光学探测器
光学探测器用于记录在给定出射角范围内离开被仿真器件的光的比例,而不是记录整个半空间内的所有光。你可以在 Inputs → Options 标签页中勾选 Include detector 启用探测器。每个仿真最多包含一个探测器,但可以通过参数扫描改变定义其接收视场的探测器角度。
探测器的结果显示在 Outputs → RAT 和 Outputs → Photon currents 标签页上。
光学探测器角度
Section titled “光学探测器角度”默认情况下,反射率和透射率结果表示的是半球反射率和透射率。如果光从正面入射,则半球反射率是指所有向上、远离组件正面的光线之和;半球透射率则是所有向下、远离组件背面的光线之和。
除了这些标准的半球输出外,还可以研究在特定角度范围内远离组件传播的光线所占的比例,这正是通过“光学探测器”实现的。
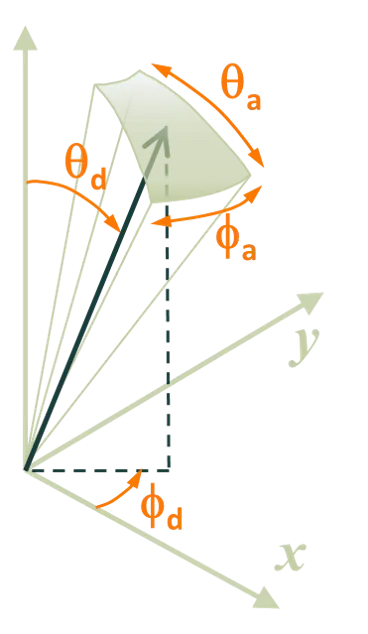
当勾选“Include detector”时,可以在 Options 标签页中找到光学探测器的输入。这些输入如图所示,分别是逃逸光线在天顶方向上的探测角和接收角( 和 ),以及在方位方向上的探测角和接收角( 和 )。
因此,光学探测器会记录所有在 和 范围内离开组件的光线。
如果未勾选“limit azimuth angle”,则方位角固定为 和 。在这种情况下, 不再重要,因为当 时,探测器会记录所有方位角 φ 内的光线。
光学探测器的用途
Section titled “光学探测器的用途”研究人员常用“雾度”(haze)来表征样品的散射特性。雾度是散射光与总光的比值,可针对反射或透射分别定义。实验上通常使用光谱仪,通过结合半球测量(带积分球)和镜面测量(不带积分球)得到。
SunSolve 可以用来模拟上述雾度测量过程,只需选择代表典型光谱仪布置的输入。例如,可将入射光的天顶角设为 8°,将探测器的天顶角设为 、接收角设为 ,并且不对 施加限制。
SunSolve 也可用于评估反射率随角度 的变化。例如,可以在 5° 至 85° 的范围内对 进行 9 步扫描,接收角固定为 ,并且不限制 。
“光学探测器”并非位于单一点,而是等效地位于整个组件的上方(或下方),仅通过光线的出射角范围加以限定。
当接收角很小时,只有很小一部分光线会被探测器记录。在这种情况下,探测器结果中的随机误差会远大于半球反射率或透射率中的随机误差。
在分析结果随角度变化的情形时,通常可以采用较大的接收角,甚至不限制 。此时来自光学探测器的信号会更强,相应的随机误差也会更小。