系统配置
高级 SunSolve 账户可以在系统级别模拟安装好的组件。要启用此类仿真,可以在 Inputs → Layout 标签页中选择 Configuration: System。
一个系统由一个或多个相同的组件组成。这些组件可以相对于地面倾斜,并通过立柱(posts)、扭矩管(torque-tubes)和夹具(clamps)等结构进行安装。光线追迹会考虑来自地面和各类安装部件的反射。每个组件的电学行为会被独立计算,并考虑组件内部电池之间的电学失配。目前版本的 SunSolve 尚不考虑组件与组件之间的电学失配。
需要注意的是,SunSolve Power 对系统级仿真的支持范围有限。如果需要更详细的系统仿真,应使用 SunSolve Yield。
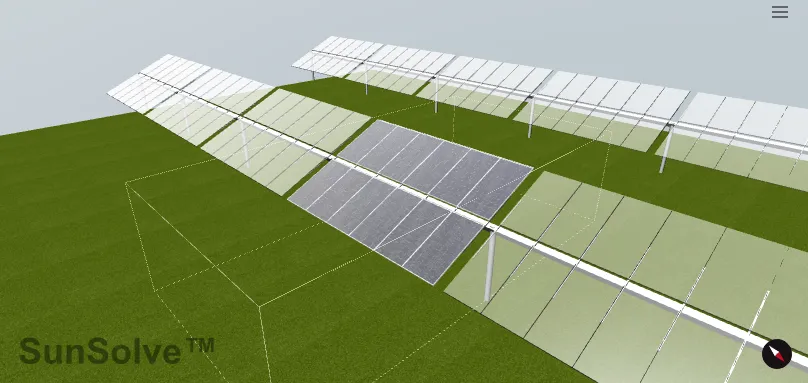
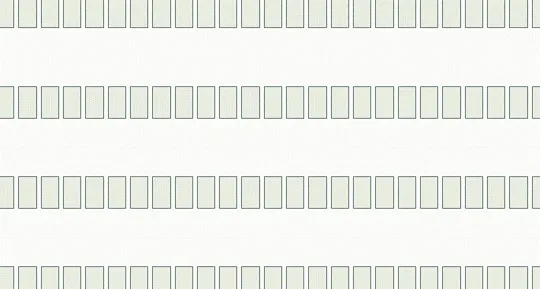
System 输入页面顶部展示了待仿真系统的 3D 渲染图。该图反映当前的仿真输入,并会随输入变化实时更新。被仿真的单元系统块(unit system)以线框形式显示,其中的组件采用近似真实的着色(注意:组件及背板的颜色并非基于仿真输入)。在光学仿真过程中,任何打到单元系统侧壁的光线都会保持原有方向和强度,但其位置会被平移到单元系统的对侧边界。这相当于模拟由无数单元系统块组成的“无限阵列”,图中以半透明的“虚拟组件”表示。图像本身只展示有限行数和有限个虚拟组件,但在仿真中该阵列在 X 和 Y 方向上延伸至无穷远。下面给出一个示例图。
可以使用鼠标旋转图像,并通过滚轮缩放图像。按住 Ctrl 键并拖动鼠标可以平移图像。右下角的罗盘指示方位,其中红色箭头指向北。
点击右上角的“三条线”图标可以更改图像外观,例如隐藏单元系统边框或修改地面的外观。这些设置不会影响仿真,仅用于生成更美观的图像。该菜单中还提供下载 *.png 格式系统图像的选项。
如果图像渲染耗时较长或遮挡了输入界面,可以点击左上角的“System image”文本将其最小化。图像在最小化期间不会重新绘制。
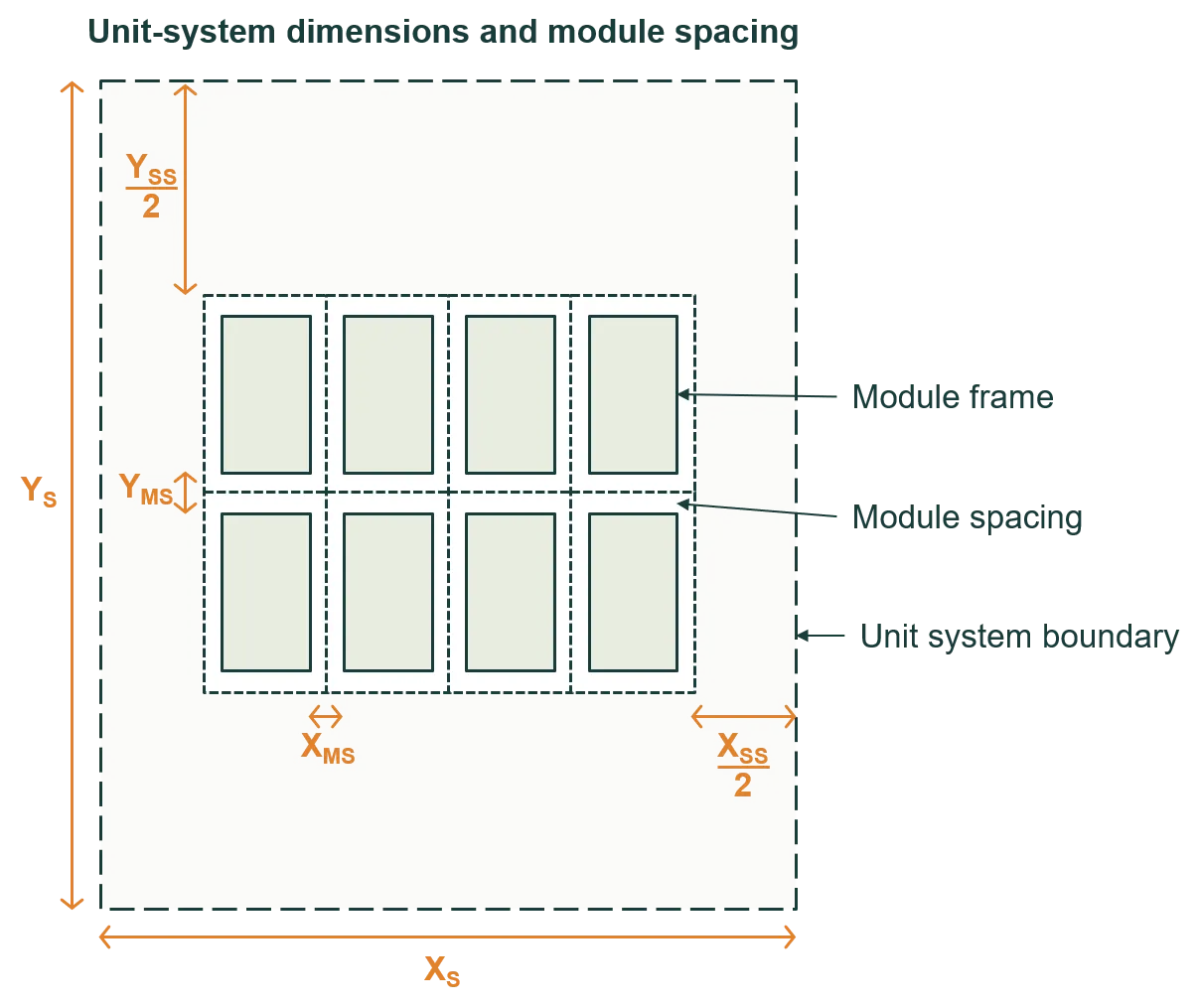
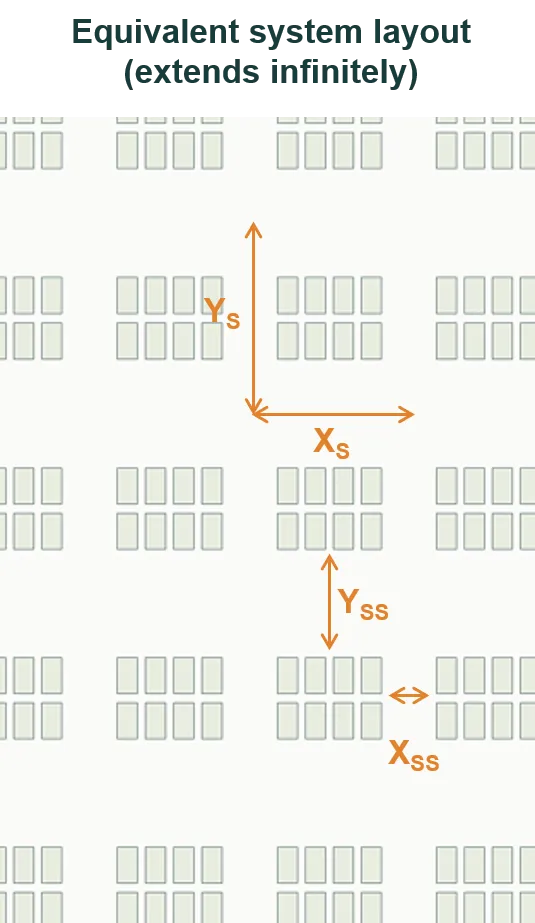
下图首先定义了“单元系统”的尺寸以及组件之间的间距 和 。其中, 和 表示单元系统的总宽度(或节距),而 和 则表示单元系统内部各组件组之间的间距。单元系统间距是在组件间距基础上的额外拓展。
第二幅图展示了当系统由该单元系统表示时的整体布局。在该示例中,每个单元系统包含 2 × 4 个组件,系统由无限多个单元系统构成,因此在 X 和 Y 方向上无限延伸。
在定义单元系统尺寸时,用户有三种方式:(i) 直接给出节距 和 ;(ii) 给出单元系统内的间距 和 ;(iii) 给出行节距和横向间距。如果组件的倾斜方向沿 X 轴,则行节距等同于 ,横向间距等同于 ;如果组件沿 Y 轴倾斜,则行节距为 ,横向间距为 。
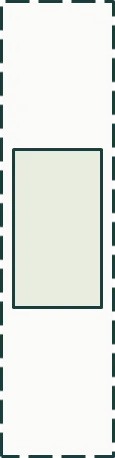
对于大型光伏系统(例如包含数百个组件的电站),我们通常最关心“中心组件”的性能。中心组件是指距离系统各边界足够远、几乎不受边缘效应影响的组件。(边缘效应通常在系统的首尾行以及每行两端约五个组件处较为显著。)
要模拟中心组件,可建立仅包含单个组件且组件间距为零的单元系统,然后为该单元系统设置合适的尺寸。下图左侧给出了一个单组件单元系统的示例,右侧则是其对应的完整系统布局示意,在 X 和 Y 方向上无限延伸。
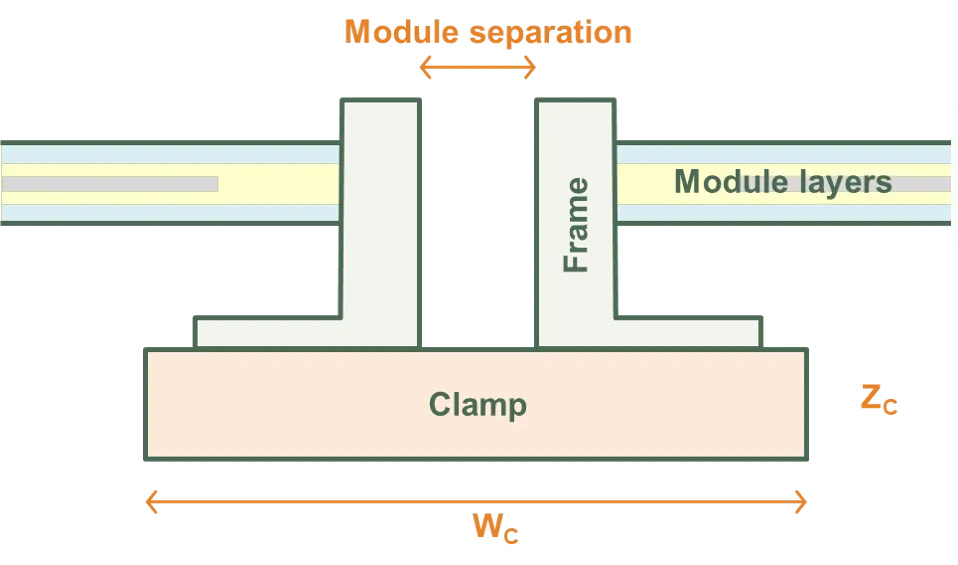
夹具(Clamps)
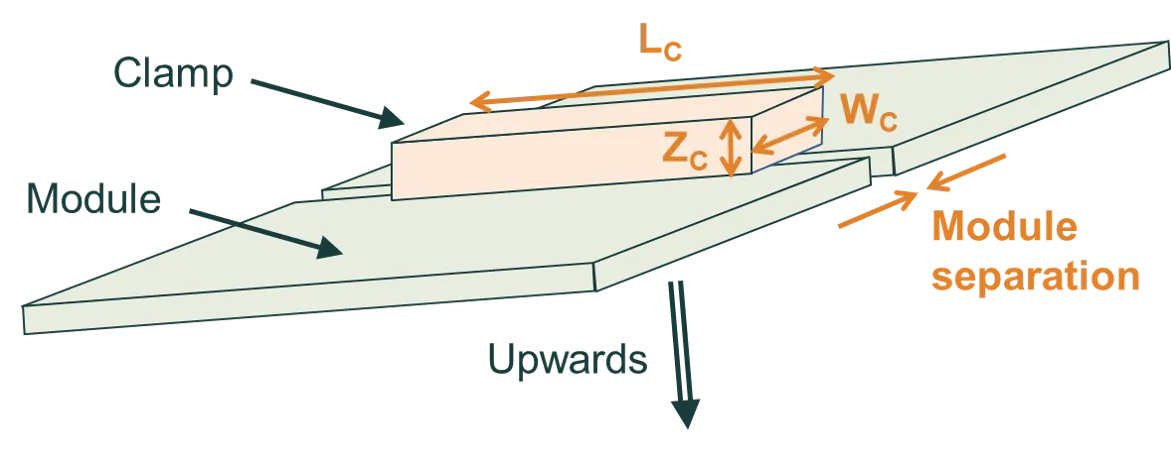
Section titled “夹具(Clamps)”SunSolve 将夹具视为矩形棱柱体。下图给出了其各向尺寸定义。
夹具位于组件边框正下方(若无边框,则位于组件层正下方)。在 XY 平面内,夹具中心与组件间距中心重合。
夹具长度必须小于组件长度;夹具宽度必须小于组件宽度与组件间距之和;夹具高度 必须小于 、 和 三者中的最小值(见下文定义)。
夹具不会超出组件间距区域伸入组件行外的空间。
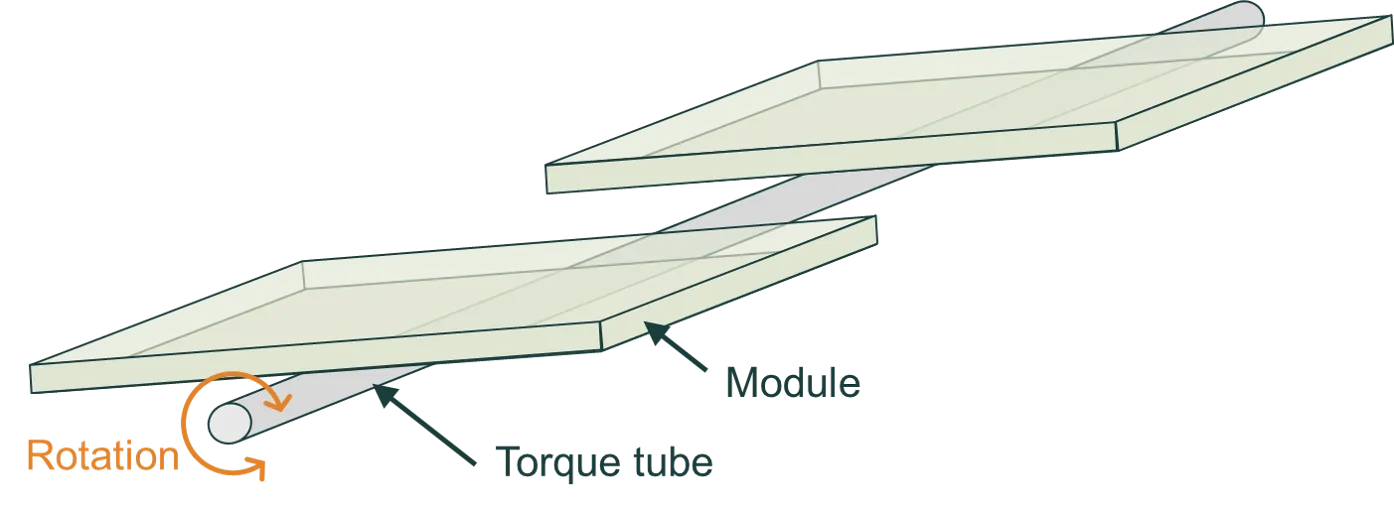
扭矩管(Torque tube)
Section titled “扭矩管(Torque tube)”单轴跟踪系统中的组件安装在扭矩管上,扭矩管会随着太阳在天空中的运动而旋转。下图展示了采用圆柱形扭矩管的一种单轴 1P 跟踪系统示例,其中“1P”表示纵向方向上每列只有一块组件。
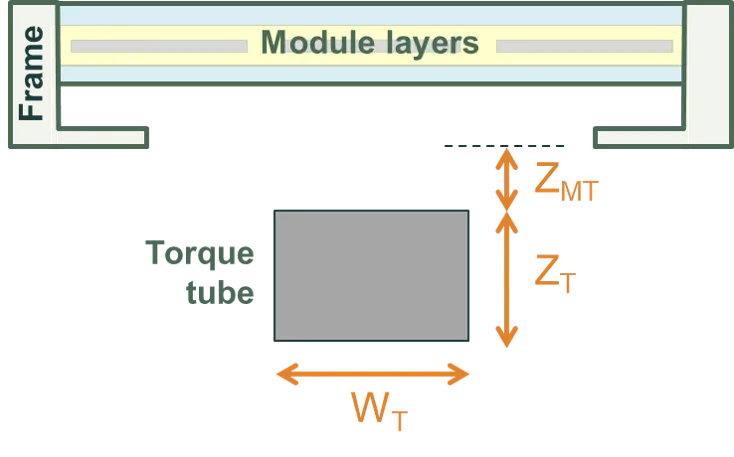
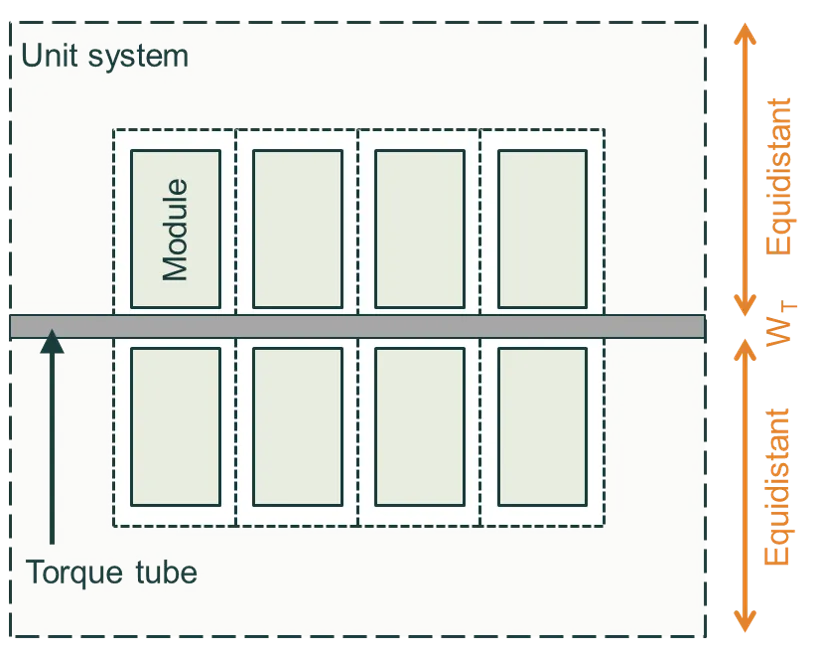
SunSolve 可以同时考虑圆柱形和矩形扭矩管带来的遮挡和反射。下图给出了相关尺寸定义:第一幅图为带矩形扭矩管的 1P 跟踪系统截面示意,第二幅图为 2P 跟踪系统的俯视示意。
扭矩管位于单元系统中心,并在该方向上延伸至单元系统边界。如果组件沿 Y 方向倾斜,则扭矩管沿 X 轴布置(如下图所示);如果组件沿 X 方向倾斜,则扭矩管沿 Y 轴布置。
立柱(Posts)
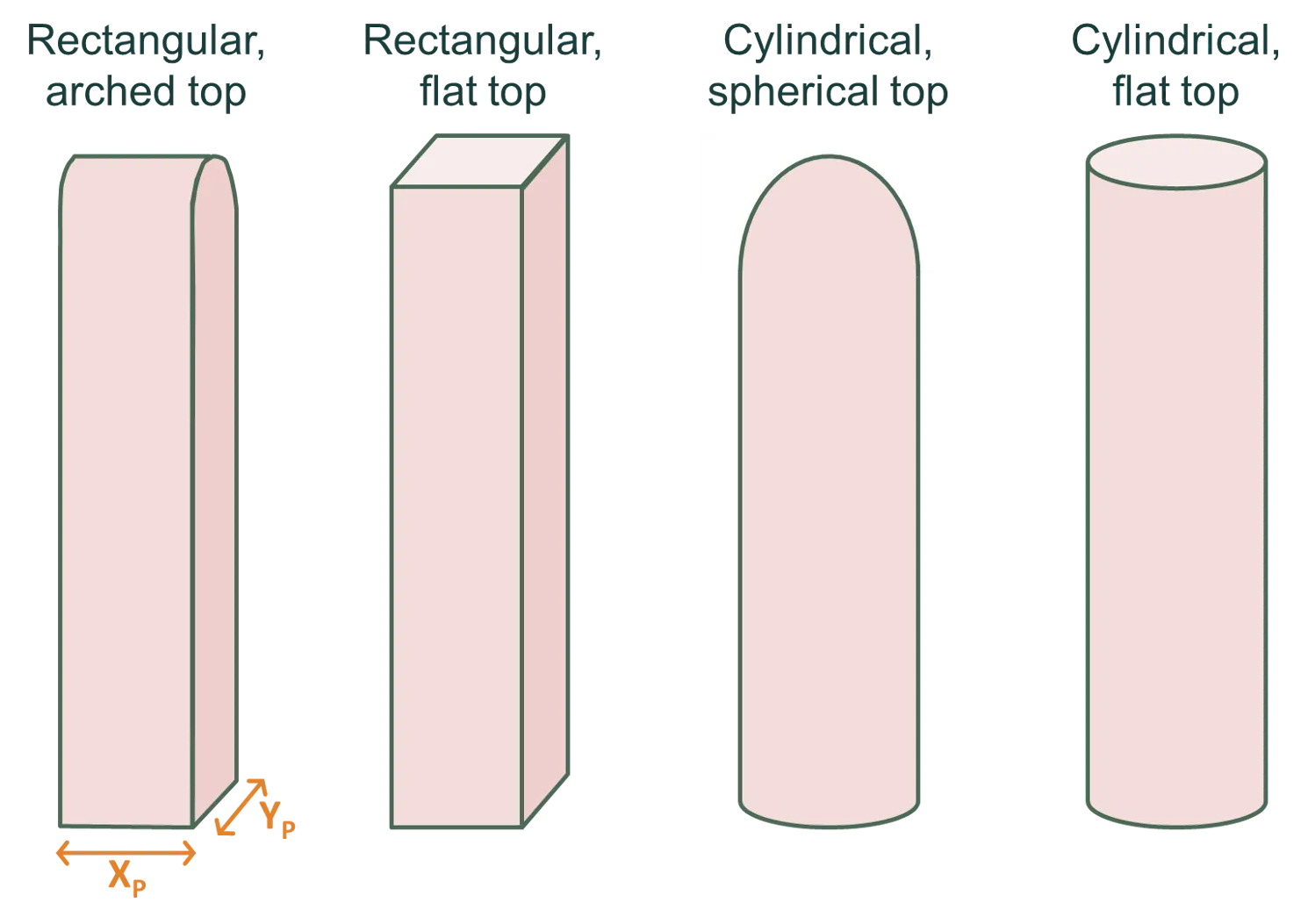
Section titled “立柱(Posts)”立柱可以是带拱顶或平顶的矩形截面,也可以是带球形顶或平顶的圆柱截面。下图展示了这些选项。
下图给出了立柱高度的定义方式:高度由立柱顶部到组件边框底部的距离决定(若无边框,则为组件层底部)。
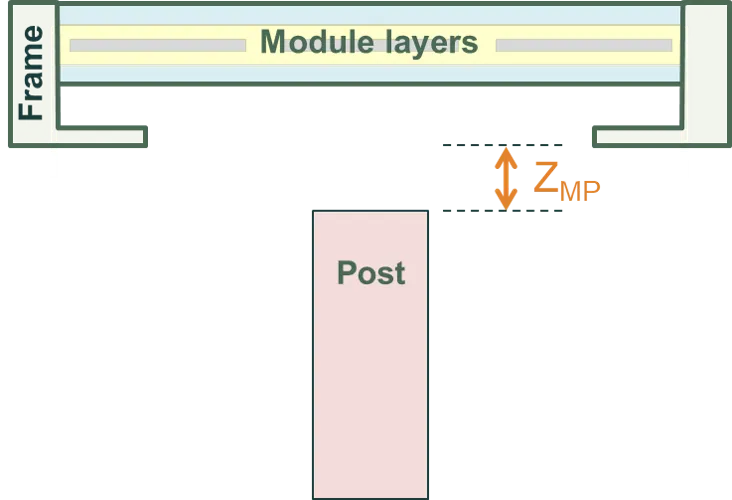
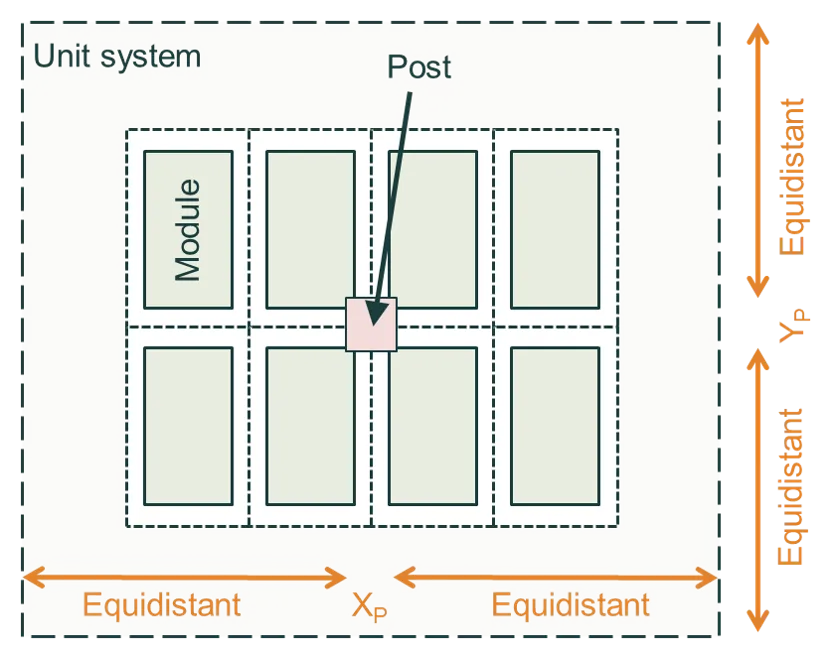
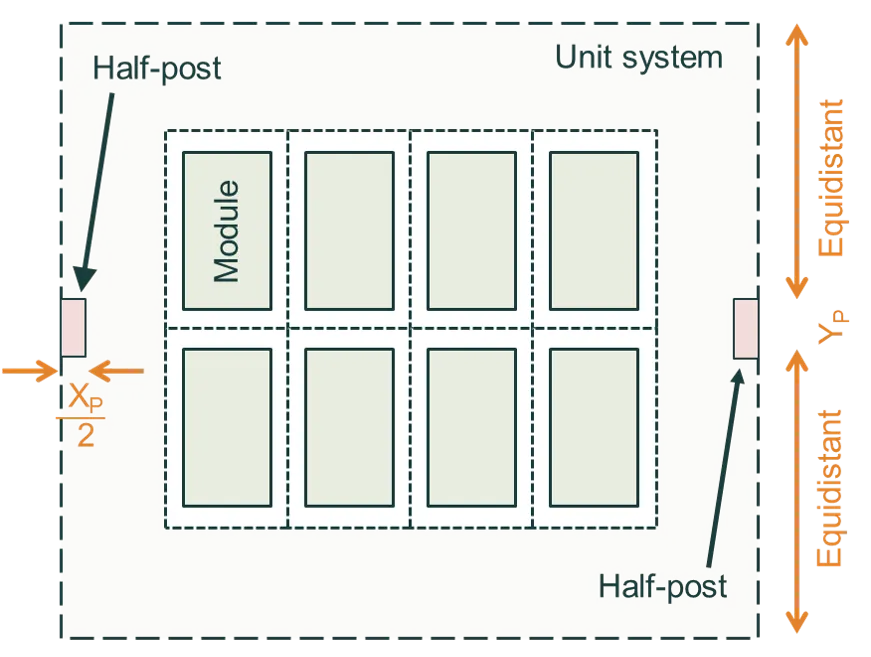
在当前版本的 SunSolve 中,立柱只有两种可能的位置,如下图所示:(左)立柱位于单元系统中心;(右)立柱位于扭矩管轴线下方,但处于单元系统边缘。
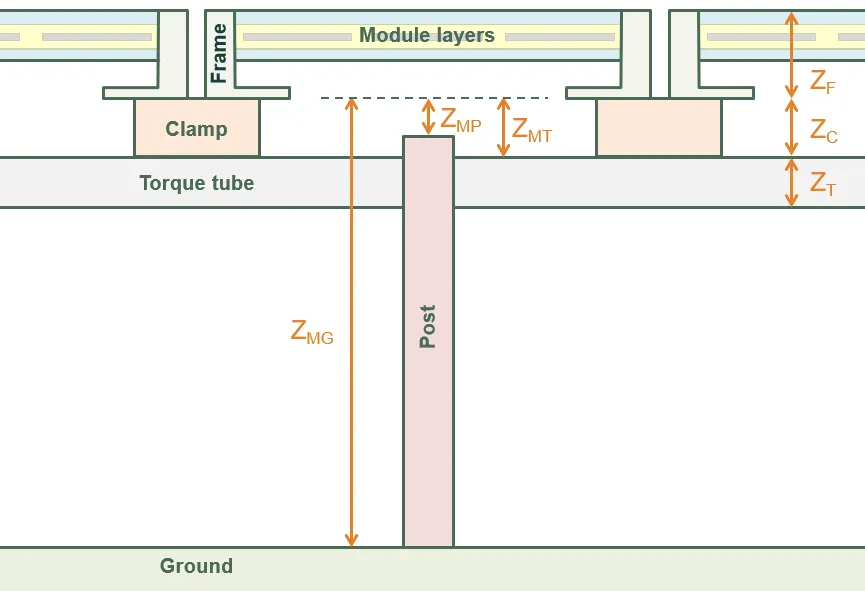
系统高度、倾角与旋转轴
Section titled “系统高度、倾角与旋转轴”下图定义了系统各部件的垂直距离。
其中最重要的是 ,即组件(含边框)底部距地面的高度。夹具和扭矩管距地面的高度,以及立柱高度,均以 为基准定义。
上述定义均针对水平放置的组件,即假设组件倾角为零。
倾斜方向和朝向
Section titled “倾斜方向和朝向”系统中的组件可以沿 X 或 Y 方向倾斜,从而实现无论电池在 X/Y 方向如何排布,都可在纵向或横向方向上设置组件倾角。
随后,组件可朝向任意罗盘方位,其方向由相对于正北方向的方位角 决定。
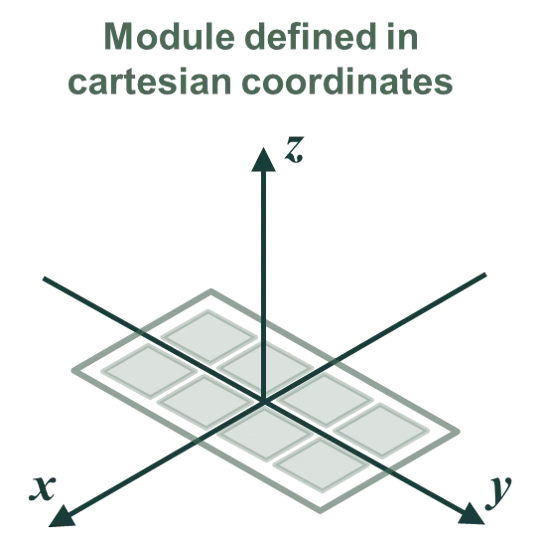
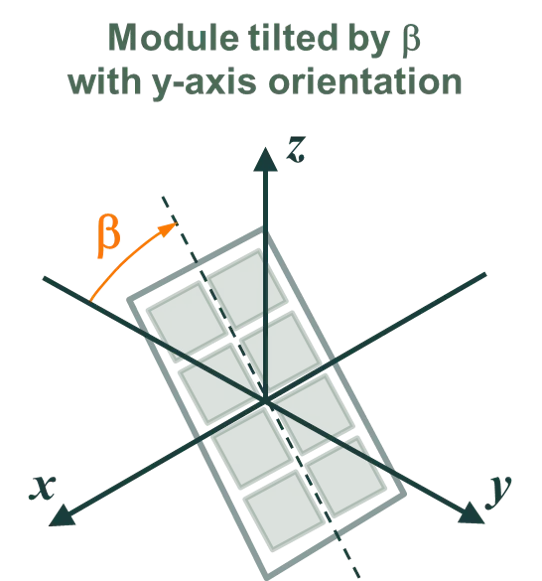
例如,下图首先在 x/y 坐标系中定义了一个组件:该组件在 x 方向有 2 列电池,在 y 方向有 4 行电池。然后在 y 方向施加倾角 (当 时,组件正面朝向 +y 方向)。最后赋予组件方位角 ,使其正面朝向东南偏东(在 情况下)。
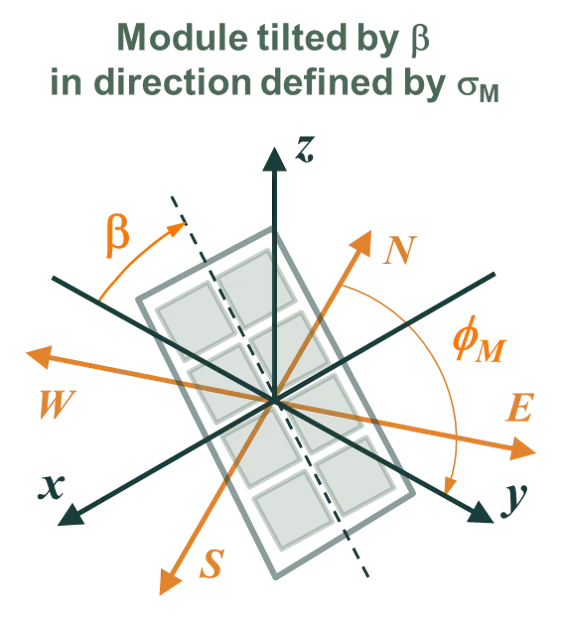
需要注意的是,在该示例中,若 为负,则组件将朝向西北偏西。
倾斜组件的旋转轴
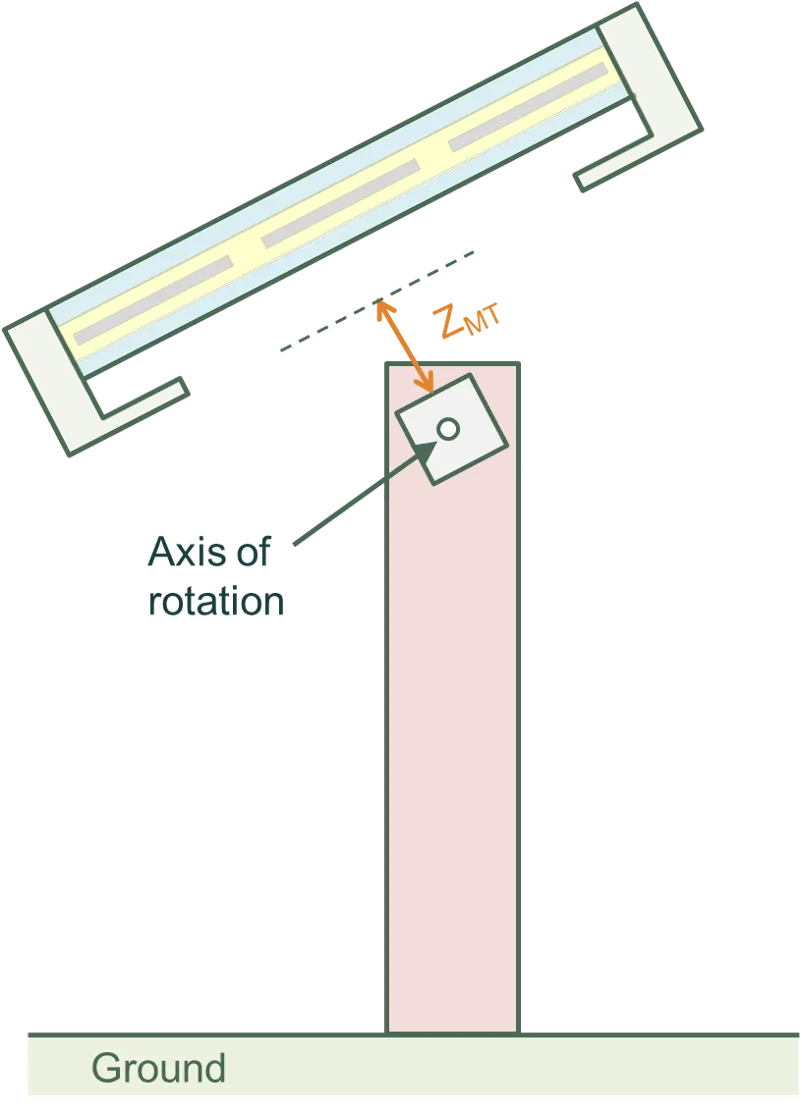
Section titled “倾斜组件的旋转轴”组件的旋转轴取决于仿真中是否包含扭矩管。
当包含扭矩管时,非零倾角会使组件、夹具和扭矩管绕扭矩管轴线旋转。
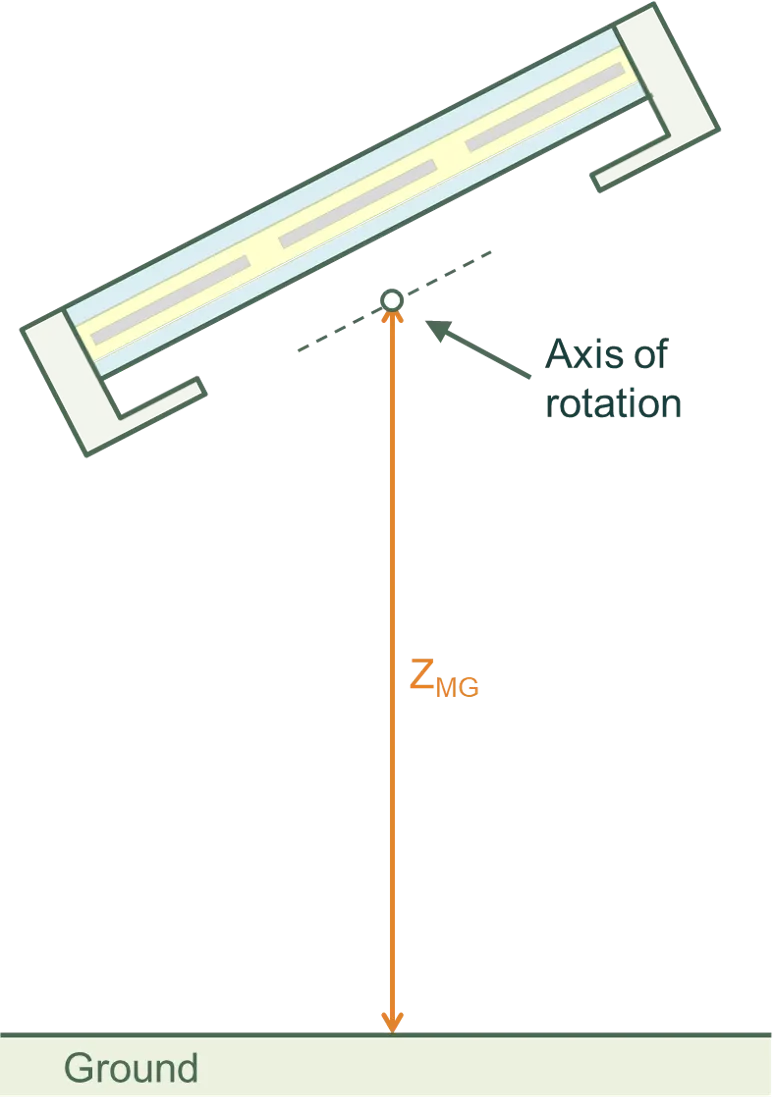
当不包含扭矩管时,非零倾角会使组件和夹具绕一条轴线旋转,该轴线在 XY 平面上通过组件中心,在 Z 方向上通过组件底部。
无论哪种情况,立柱均保持不动。
下图分别给出了有扭矩管和无扭矩管时的旋转轴示意。