单轴跟踪系统布局
单轴跟踪系统的特点是组件绕轴旋转以全天跟随太阳,最大化能量捕获。结构包括支柱、扭矩管、夹具和导轨。
单轴跟踪系统使用标准的 XY 轴或横向/纵向尺寸定义方法。这些方法定义了组件在阵列中的排列方式以及它们之间的间距。
请参阅**系统尺寸**页面。
组件布局:单个距间与多个距间
Section titled “组件布局:单个距间与多个距间”组件布局设置允许您定义组件如何沿跟踪器的旋转轴排列。这会影响阴影、机械结构和整体系统设计。
在单个距间配置中,一行中的所有组件都是单个连续部分的一部分。
- 横向组件的总数定义了沿旋转轴横向重复多少个组件。
- 沿跟踪器的组件组之间没有间隙或分隔。请注意,如系统尺寸页面所述,横向间距应用于每个组件之间。
在多个距间配置中,跟踪器行被分为多个部分(距间),它们之间有间隙。
您定义:
- 每个跟踪器的距间数量(1-10 个距间)
- 每个距间沿行轴的组件数量。每个距间可以有不同数量的组件(1-200 个组件/距间),为非均匀跟踪器设计提供灵活性。每个距间中的组件总数将与垂直方向的组件数量相乘。
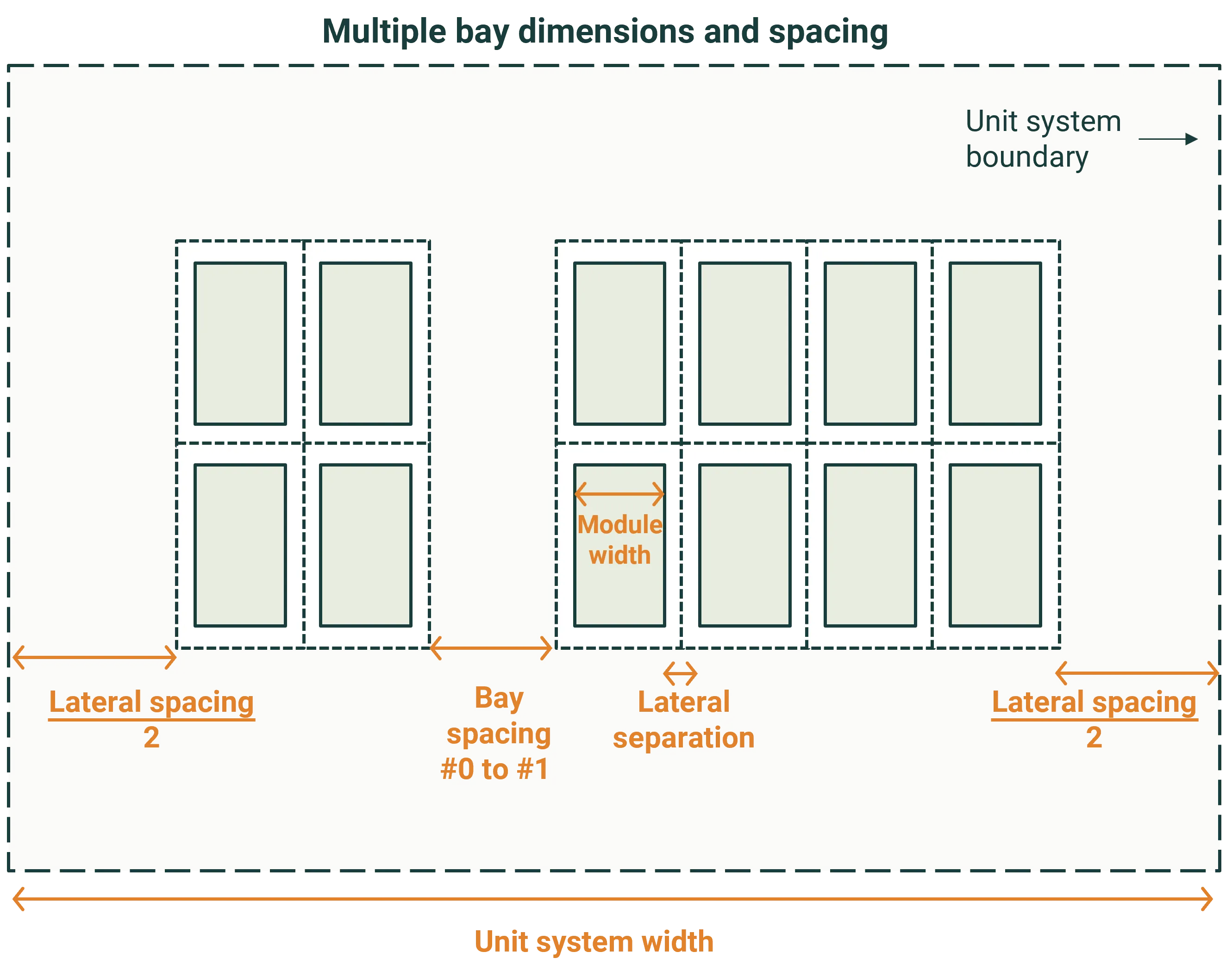
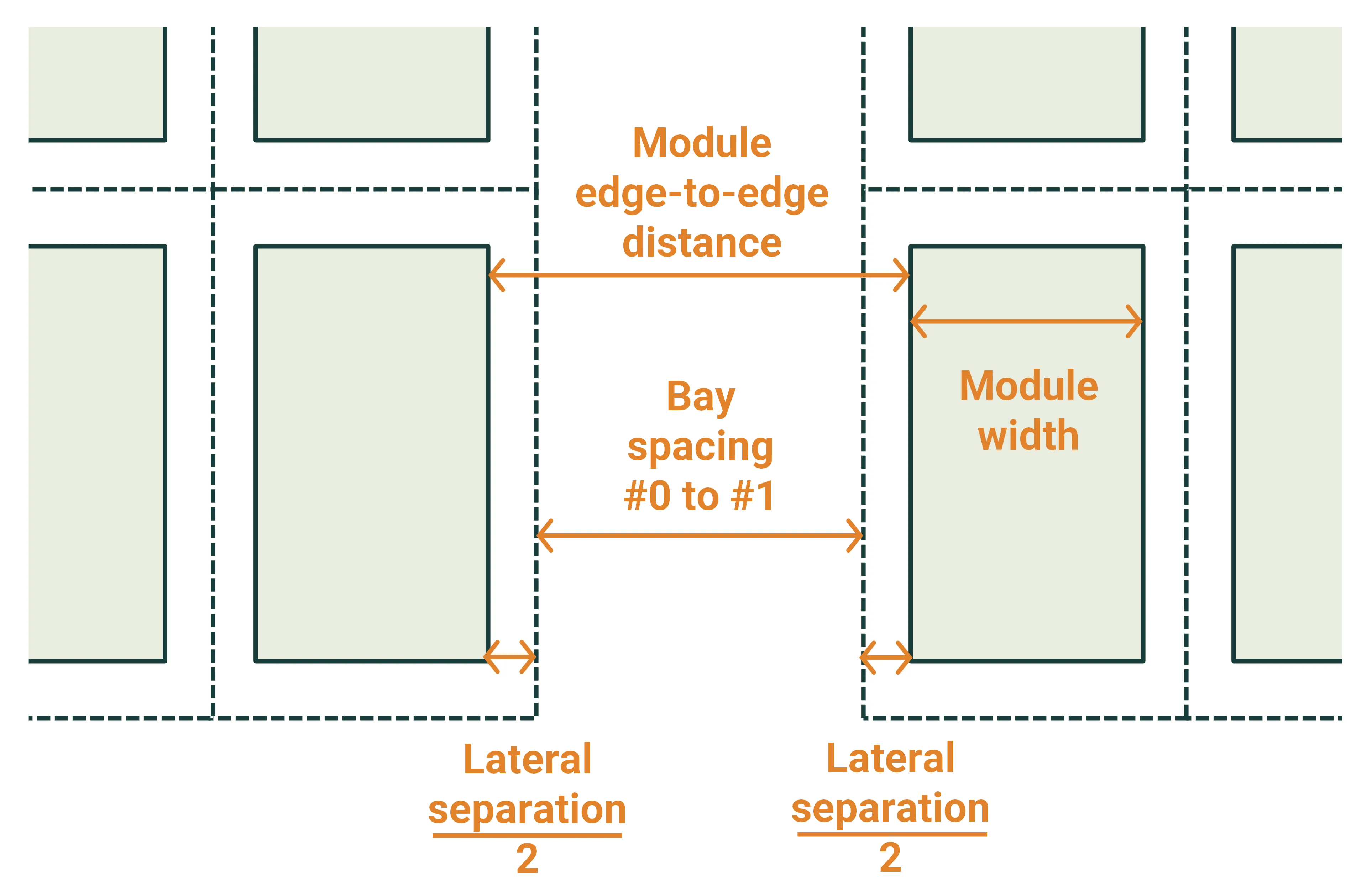
- 距间之间的间距: 沿跟踪器轴相邻距间之间的间隙。这是应用于距间之间的”内部”间距,不在外边缘。组件边缘到边缘的总距离是距间间距加上组件的横向间距。
请注意,距间间距应用于光学模型,但目前未用于简化的热模型。
下图显示了一个示例,其中距间数量设置为两个。一个距间包含每个距间两个组件,另一个包含每个距间四个组件。
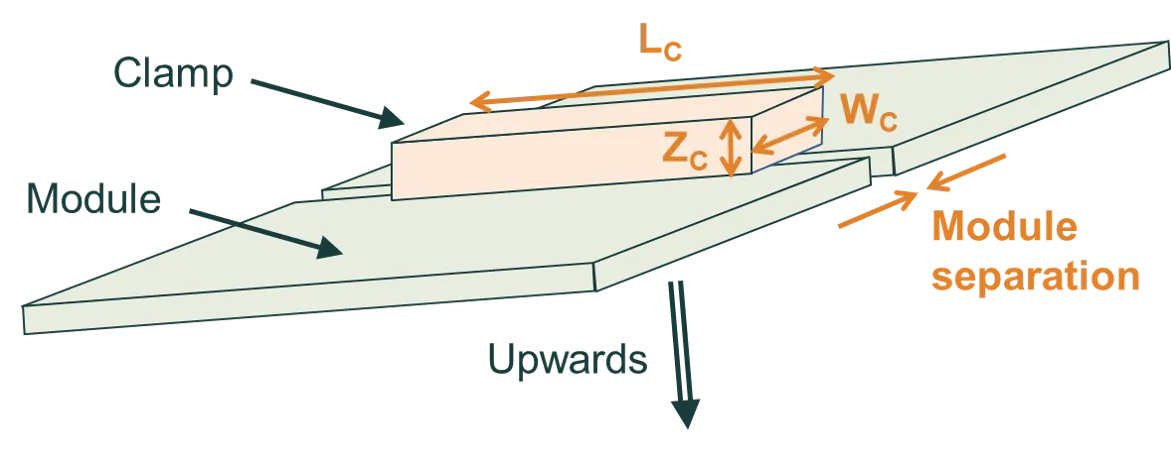
夹具用于将组件固定到跟踪结构上。SunSolve 将夹具视为矩形棱柱。
夹具位于组件框架的直接下方(或者如果没有框架,则位于组件层的直接下方)。在 XY 平面中,夹具的中心与组件间距的中心重合。每个组件创建两个夹具。
夹具不会超出组件间距延伸到组件行周围的空间。
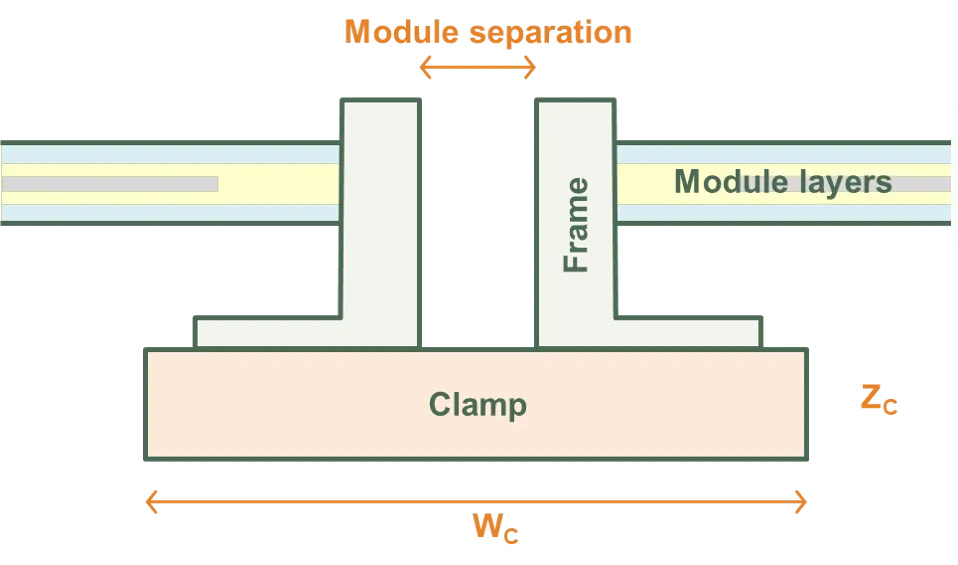
下图定义了夹具尺寸:
- 长度 (LC): 夹具沿组件侧面的长度
- 宽度 (WC): 夹具垂直于组件侧面的宽度
- 高度 (ZC): 夹具的垂直厚度
夹具尺寸必须满足以下约束:
- 夹具长度必须 ≤ 组件组长度(根据倾斜方向而变化)
- 夹具宽度必须 ≤ 组件宽度 + 组件间距
- 夹具高度必须 < min(ZMT, ZMP, ZMG)(请参阅下面的高度定义)
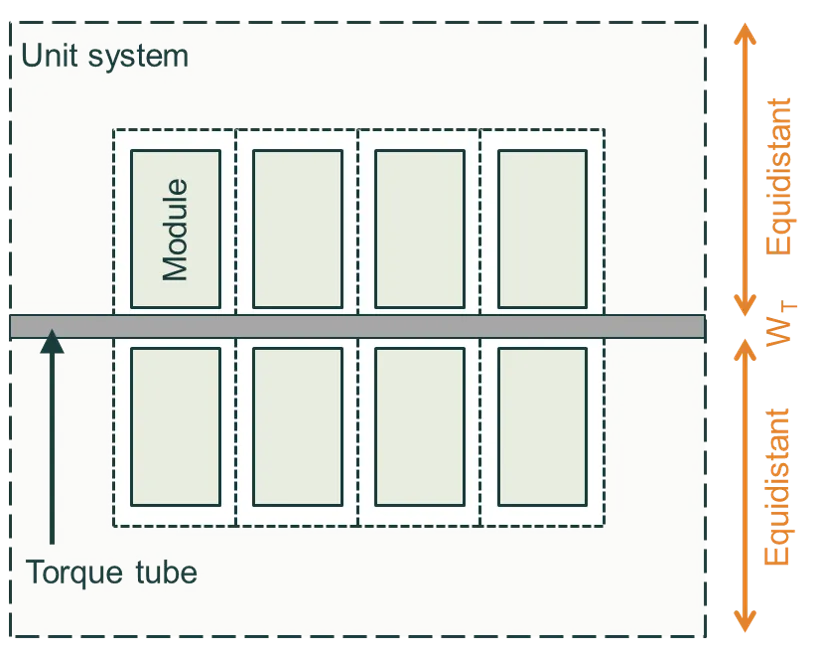
单轴跟踪系统的组件安装在扭矩管上,当太阳穿过天空时扭矩管会旋转。下图显示了一个带有圆柱形扭矩管的单轴跟踪 1P 系统;‘1P’ 代表一个纵向组件。
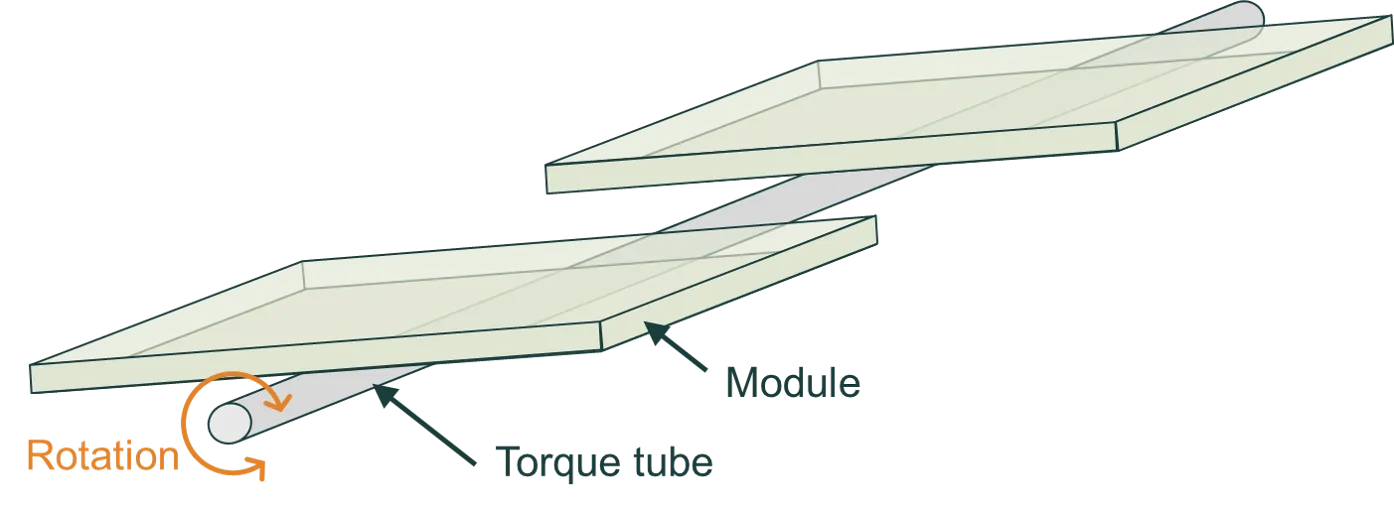
扭矩管横截面的形状:
- 圆形: 由直径定义
- 矩形: 由宽度和高度尺寸定义
- 六边形: 由内直径(内切圆)定义
- 八边形: 由内直径(内切圆)定义
SunSolve 可以考虑所有扭矩管形状的阴影和反射。
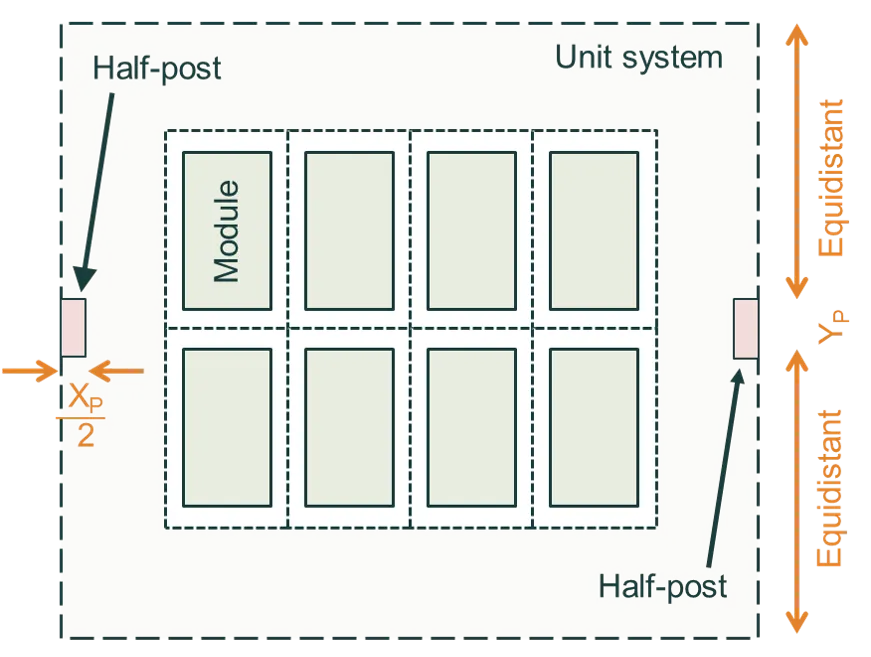
扭矩管位于单元系统的中心,并延伸到单元系统的边缘:
- 如果组件在 Y 方向倾斜,扭矩管与 X 轴对齐
- 如果组件在 X 方向倾斜,扭矩管与 Y 轴对齐
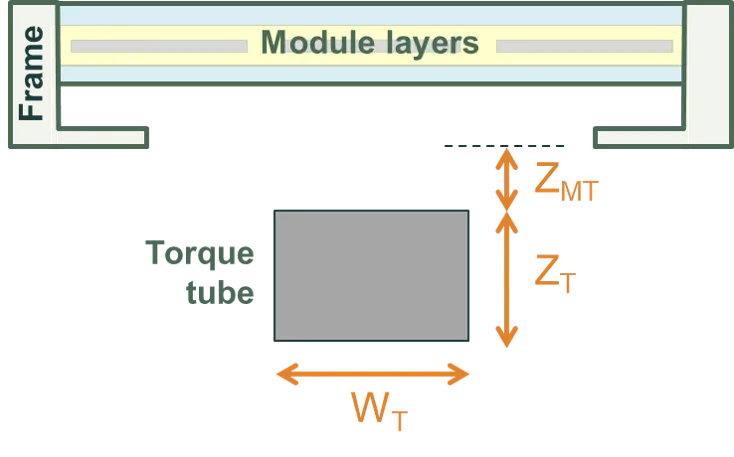
下图显示了横截面和平面视图。第一张图显示了带有矩形扭矩管的 1P 跟踪系统的横截面。第二张图显示了 2P 跟踪系统的平面图。
- 直径 (DTT): 对于圆形横截面
- 宽度 (WTT): 对于矩形横截面,水平尺寸
- 高度 (HTT): 对于矩形横截面,垂直尺寸
- 内直径 (DTT,inner): 对于六边形和八边形横截面,内切圆的直径
- 组件组下方距离 (ZMT): 从组件组底部到扭矩管顶部的垂直距离
支柱是将负载从跟踪系统传递到地面的垂直支撑结构。
支柱横截面的形状:
- 矩形: 由 X 和 Y 尺寸定义
- 圆形: 由直径定义
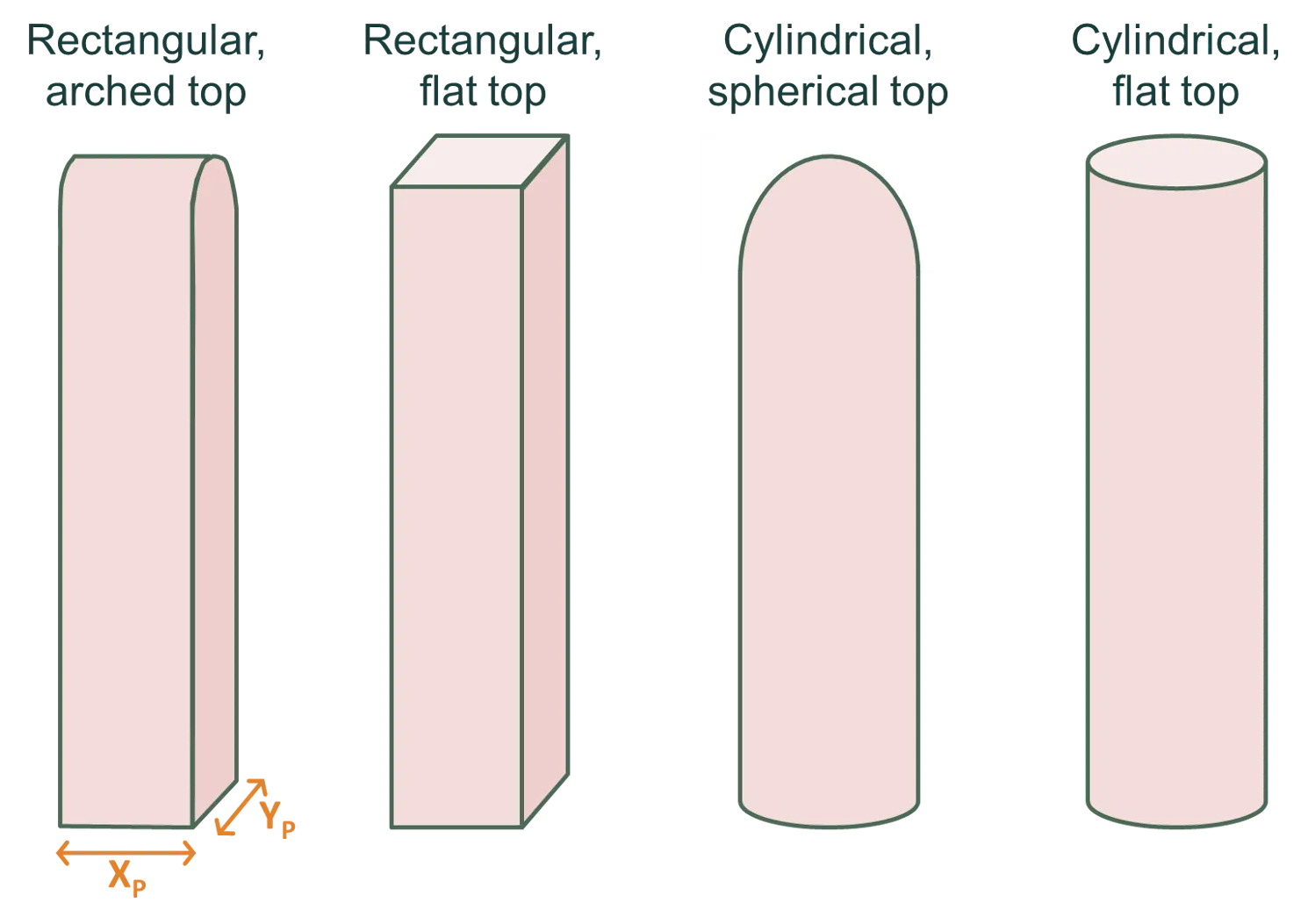
支柱顶部(顶盖)的几何形状:
- 平面: 简单的平顶支柱,没有顶盖(圆形和矩形均可用)
- 拱形: 带有半圆柱形状的拱形顶盖(仅限矩形支柱)
- 半球形: 带有半球几何形状的穹顶形顶盖(仅限圆形支柱)
顶部形状影响视觉外观,并可能影响从支柱顶部反射的光线的光线追踪。下图显示了这些选项。
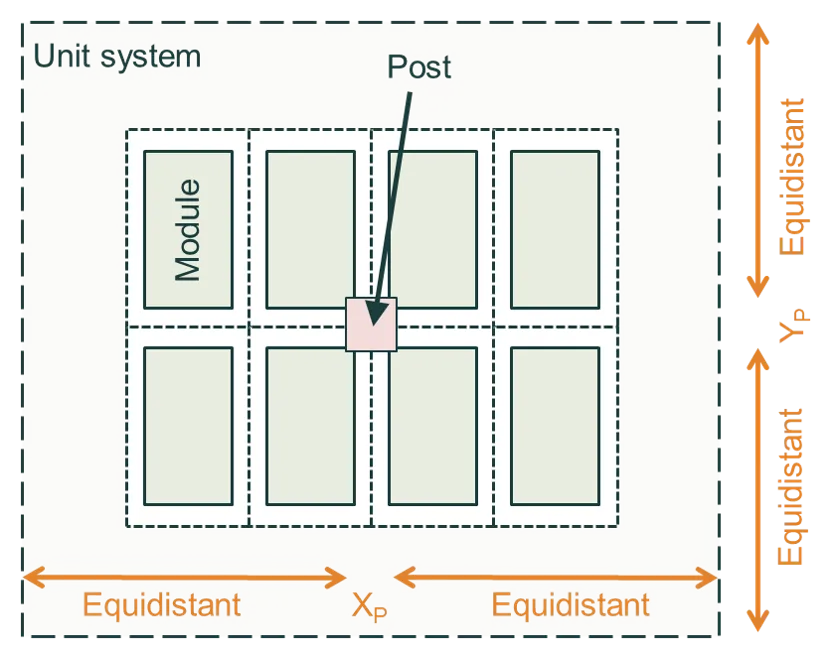
支柱可以以两种布局模式定位:
中心
- 支柱沿扭矩管下方的跟踪器轴分布
- 支柱数量 (Npost): 每个组件组的支柱总数(1-10,000)
- 支柱间距 (Ppost): 相邻支柱之间的水平中心到中心间距
- 支柱沿跟踪器长度均匀分布
边缘
- 支柱仅位于单元系统边界
- 每个跟踪器两根支柱,位于边缘
- 支柱以扭矩管轴为中心,但位于单元系统的边缘
支柱的边缘处理
Section titled “支柱的边缘处理”当支柱的位置使其宽度(横截面尺寸)会延伸到单元系统边界之外时,它们会自动渲染为与边界齐平的半宽元素。这确保了单元系统无限重复时适当的平铺。
- 对于圆形支柱: 创建半圆柱而不是完整的圆柱
- 对于矩形支柱: 宽度减半
- 支柱的位置使其平边与单元系统边界对齐
支柱高度计算
Section titled “支柱高度计算”支柱高度根据从支柱顶部到组件框架底部(或如果没有框架则到组件层底部)的距离自动计算。下图显示了这个尺寸。
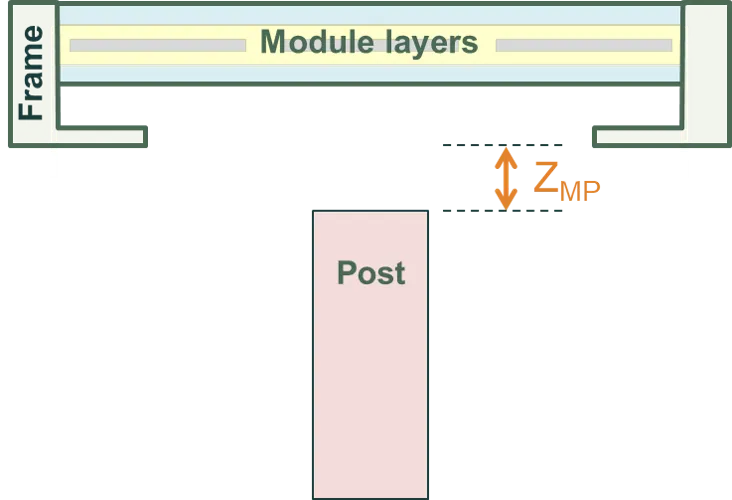
从支柱顶部到面板底部的距离 (ZMP): 支柱顶部与组件组底部之间的垂直间隙。
- X 尺寸 (Xpost): 对于矩形横截面,X 方向的宽度
- Y 尺寸 (Ypost): 对于矩形横截面,Y 方向的宽度
- 直径 (Dpost): 对于圆形横截面
下图显示了这些选项:(左)中心布局,支柱沿跟踪器分布,以及(右)边缘布局,支柱位于单元系统边界。
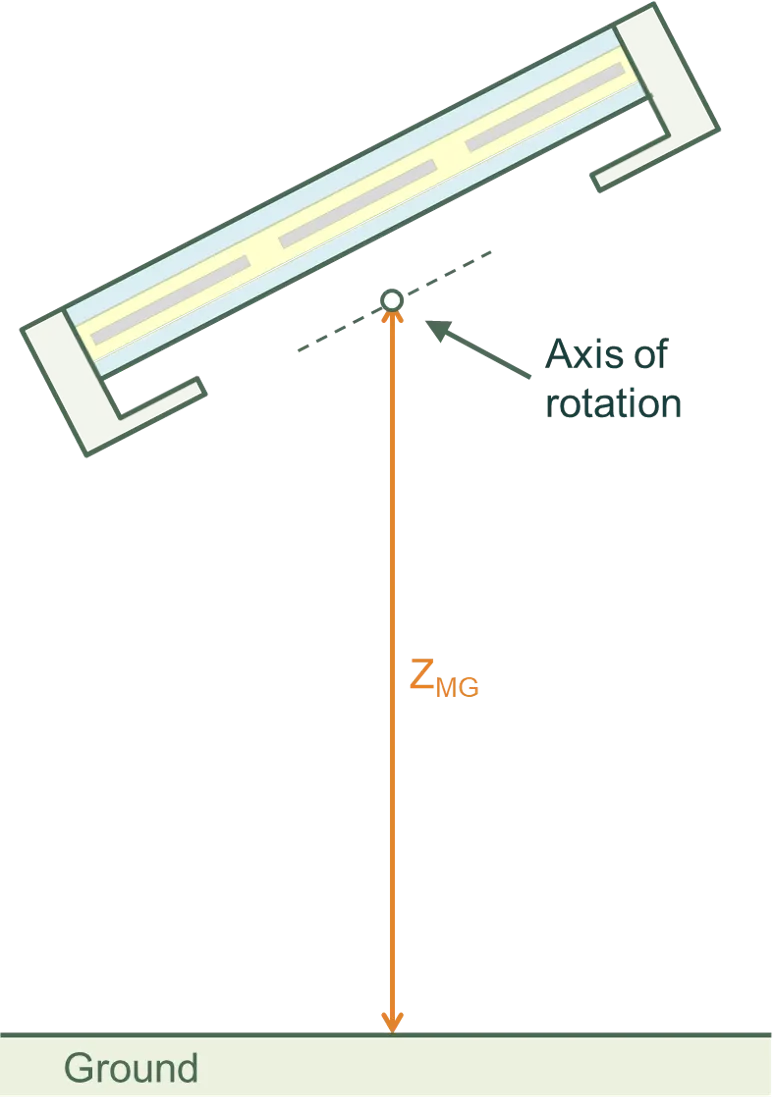
系统高度、倾角和旋转轴
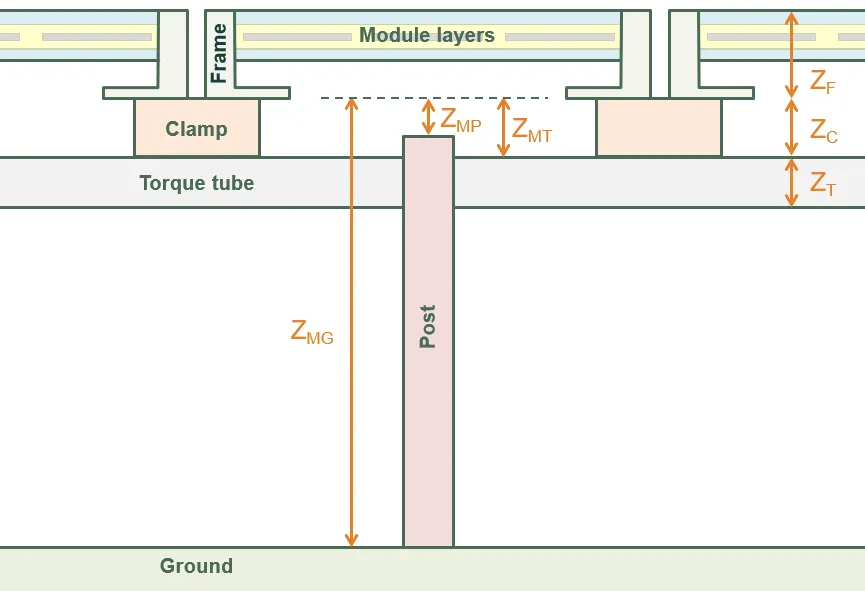
Section titled “系统高度、倾角和旋转轴”下图定义了系统组件的垂直距离。
最重要的距离是 ZMG,组件底部(包括其框架)高于地面的高度。夹具和扭矩管高于地面的高度以及支柱的高度都从 ZMG 定义。
所有这些定义都针对水平组件;即,它们假设组件倾角为零。
倾斜方向和方位
Section titled “倾斜方向和方位”系统的组件可以在 X 或 Y 方向倾斜。这允许您以纵向或横向倾斜它们,无论分配给 X 和 Y 方向多少个单元。
然后,组件面向罗盘的任何方向,由组件相对于正北的方位角 φ 定义。
例如,下图首先显示了如何在 x/y 坐标中定义组件。该组件在 x 方向有两列,在 y 方向有四行。然后组件在 y 方向倾斜一个角度 β(其中正 β 使组件正面面向正 y 方向)。最后,组件被分配一个方向 φM = 112.5°,使得组件正面面向东南东(对于正 β)。
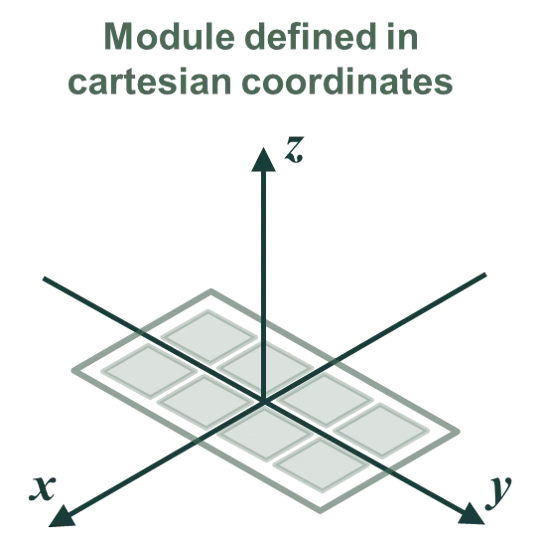
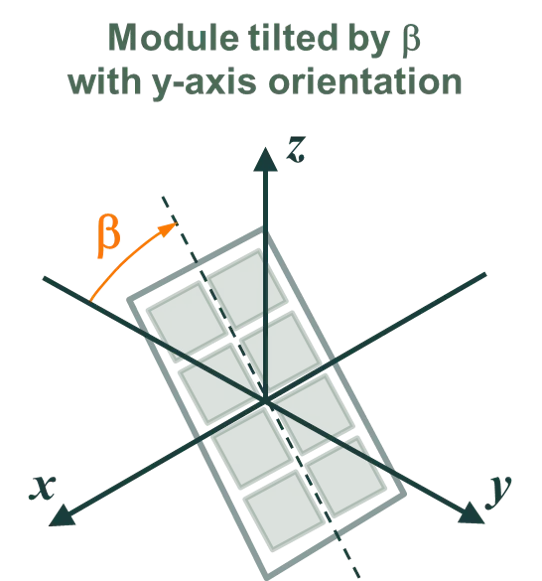
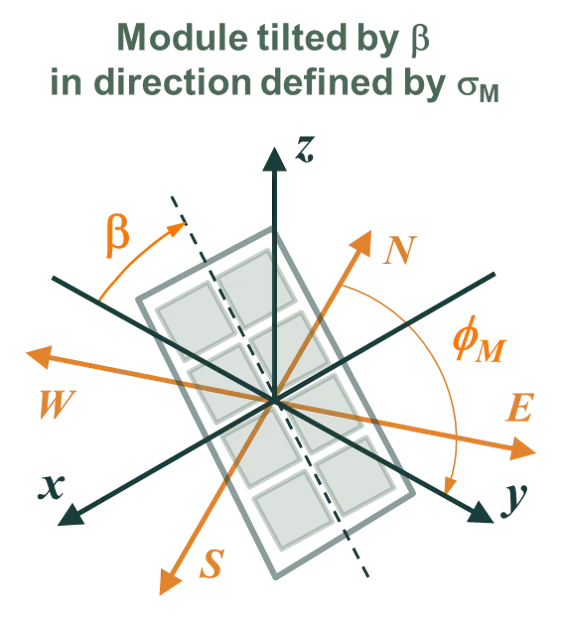
请注意,在此示例中,负 β 将使组件面向西北西。
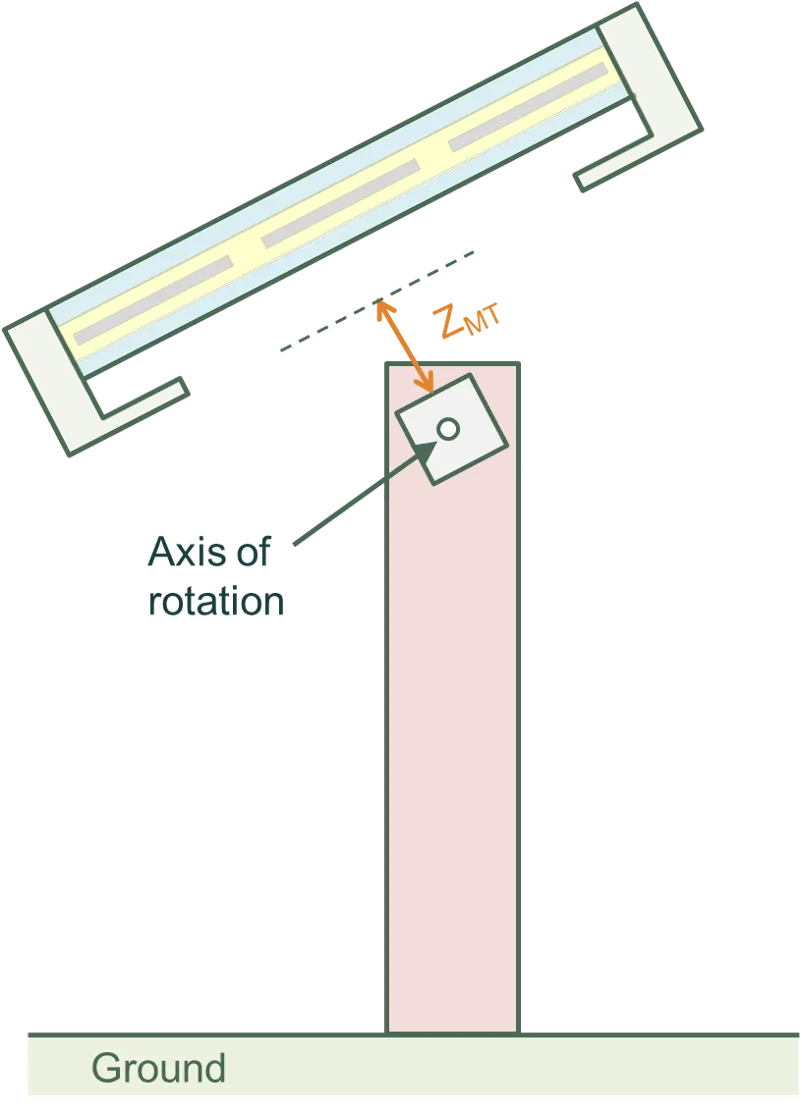
倾斜组件的旋转轴
Section titled “倾斜组件的旋转轴”旋转轴取决于模拟中是否包含扭矩管。
如果有扭矩管,非零倾角会导致组件、夹具和扭矩管绕扭矩管轴旋转。
如果没有扭矩管,非零倾角会导致组件和夹具绕通过 XY 平面中组件中间和 Z 平面中组件底部的轴旋转。
在任何情况下,支柱保持静止。
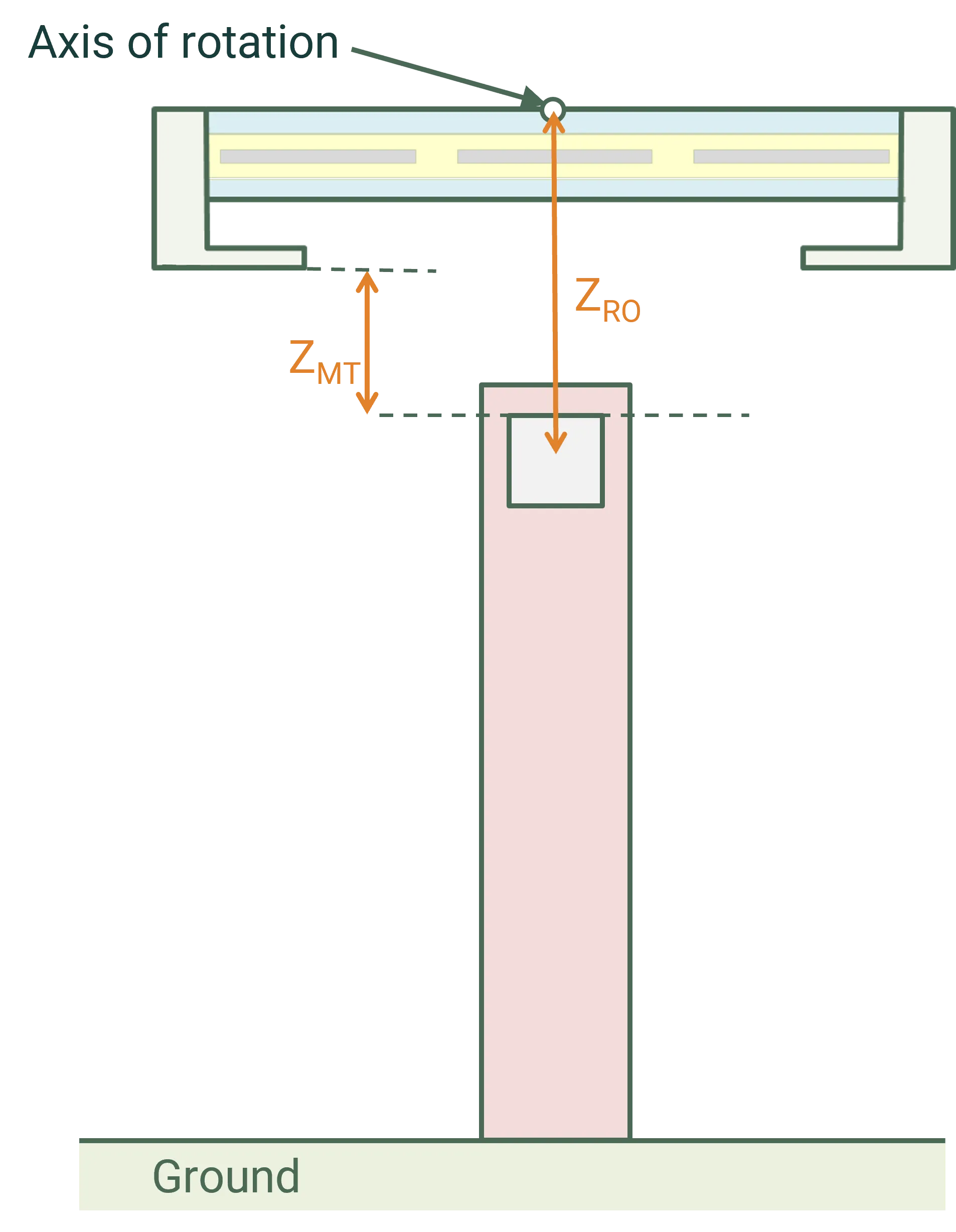
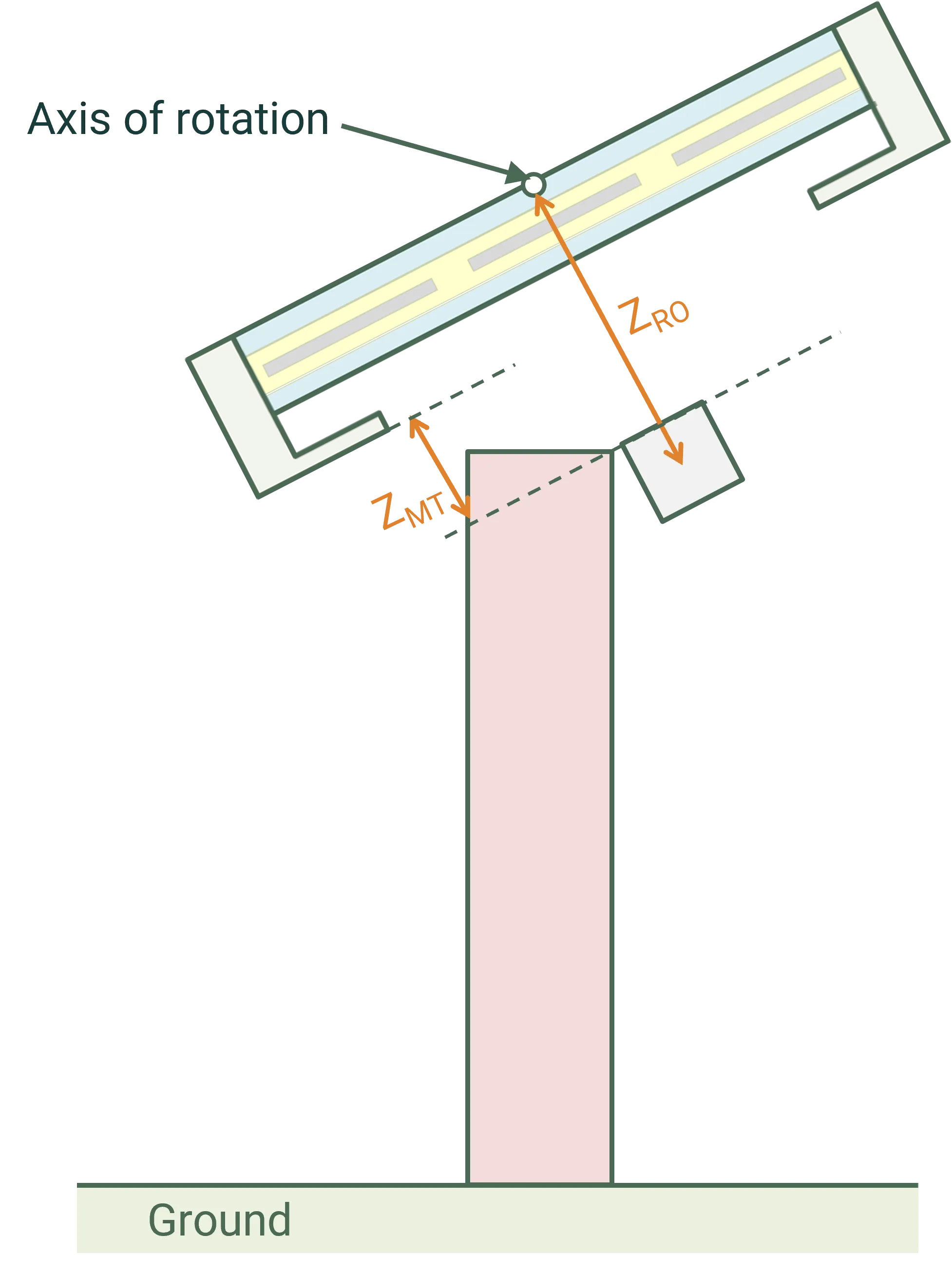
下图指示了有或没有扭矩管的旋转轴。
从 SunSolve 版本 6.15.0 开始,还可以定义额外的旋转偏移 (ZRO)。这个偏移移动倾斜旋转发生的点的位置,如下图所示。正偏移增加旋转点高于地面的高度(如图所示),负偏移使其位置更接近地面。如上所述,这种旋转应用于 PV 面板、夹具/导轨和扭矩管。它不适用于支柱。