波浪系统布局
波浪系统的特点是组件成对排列并相对,形成波浪状轮廓。这些系统通常用于平屋顶安装,其中组件安装在压载结构上而不穿透屋顶膜。
波浪的单元系统尺寸使用组件尺寸、组件倾角和一系列下面定义的间隙/间距来确定。
- 横向组件: 跨越波浪的组件数量,正交于倾斜方向(1-50 个组件)
- 垂直组件: 波浪中垂直堆叠的组件数量,在倾斜方向(1-6 个组件)
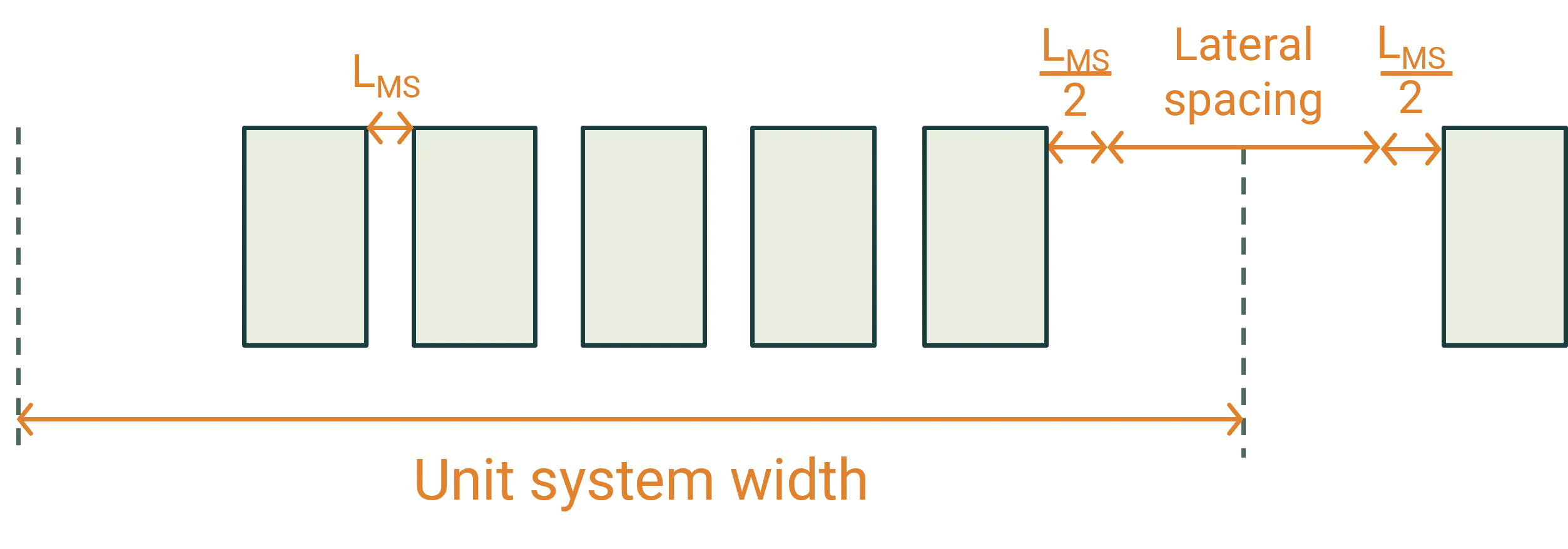
- 横向组件间距 (LMS): 跨越波浪相邻组件之间的间隙(0-200 cm)
- 垂直组件间距: 当垂直组件 > 1 时,垂直堆叠组件之间的间隙(0-200 cm)。此参数仅在配置多个垂直组件时显示。
峰值和谷值间距
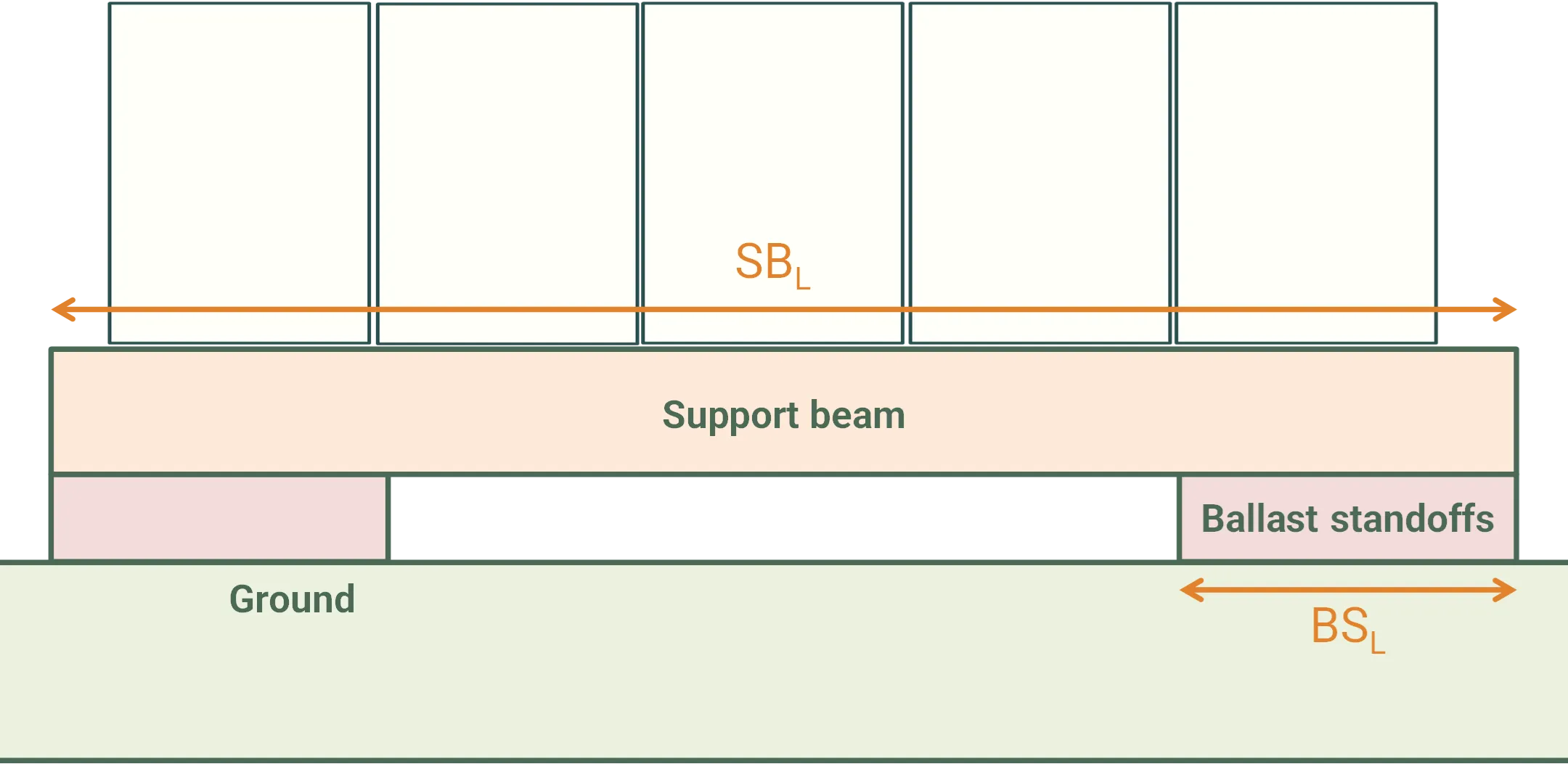
Section titled “峰值和谷值间距”在波浪的峰值 (PMS) 和谷值 (TMS) 定义了间隙。这是从倾斜组件边缘上的一个点测量的,该点正好是组件厚度的一半。然后单元系统深度计算为:
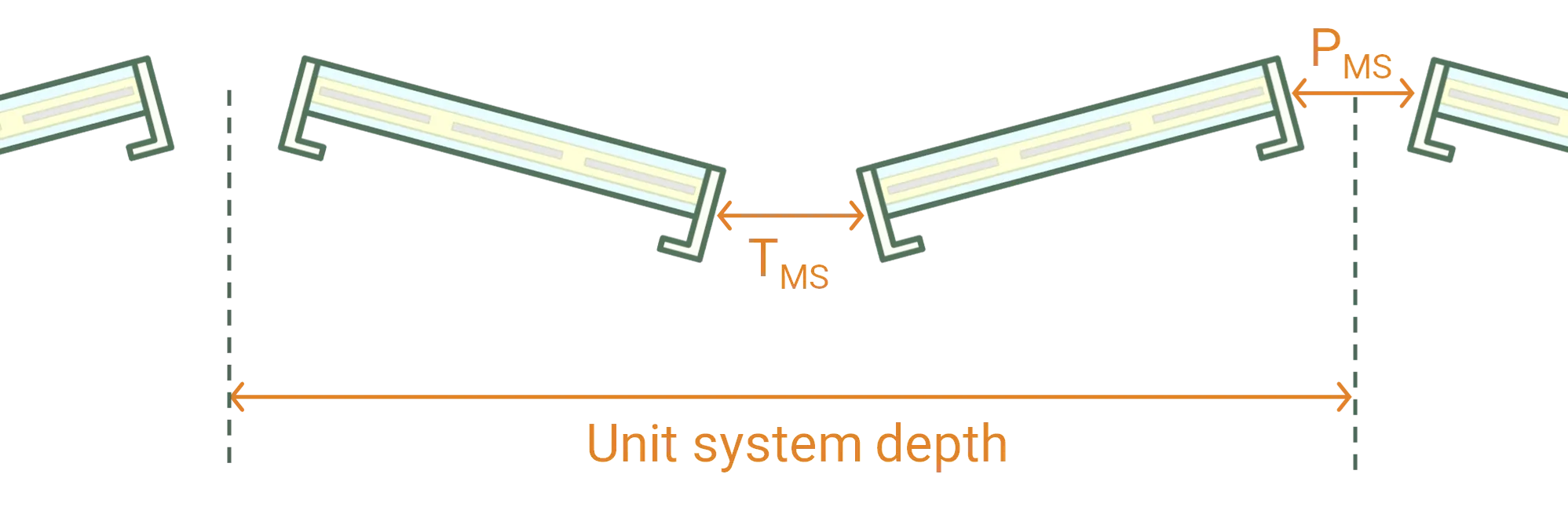
相邻组件之间的横向组件间距 (LMS) 应用于整个波浪。该间距的一半应用于波浪的每个边缘(请参见下图)。
额外的横向间距参数定义了无限单元系统平铺中波浪之间的额外间距。然后单元系统宽度计算为:
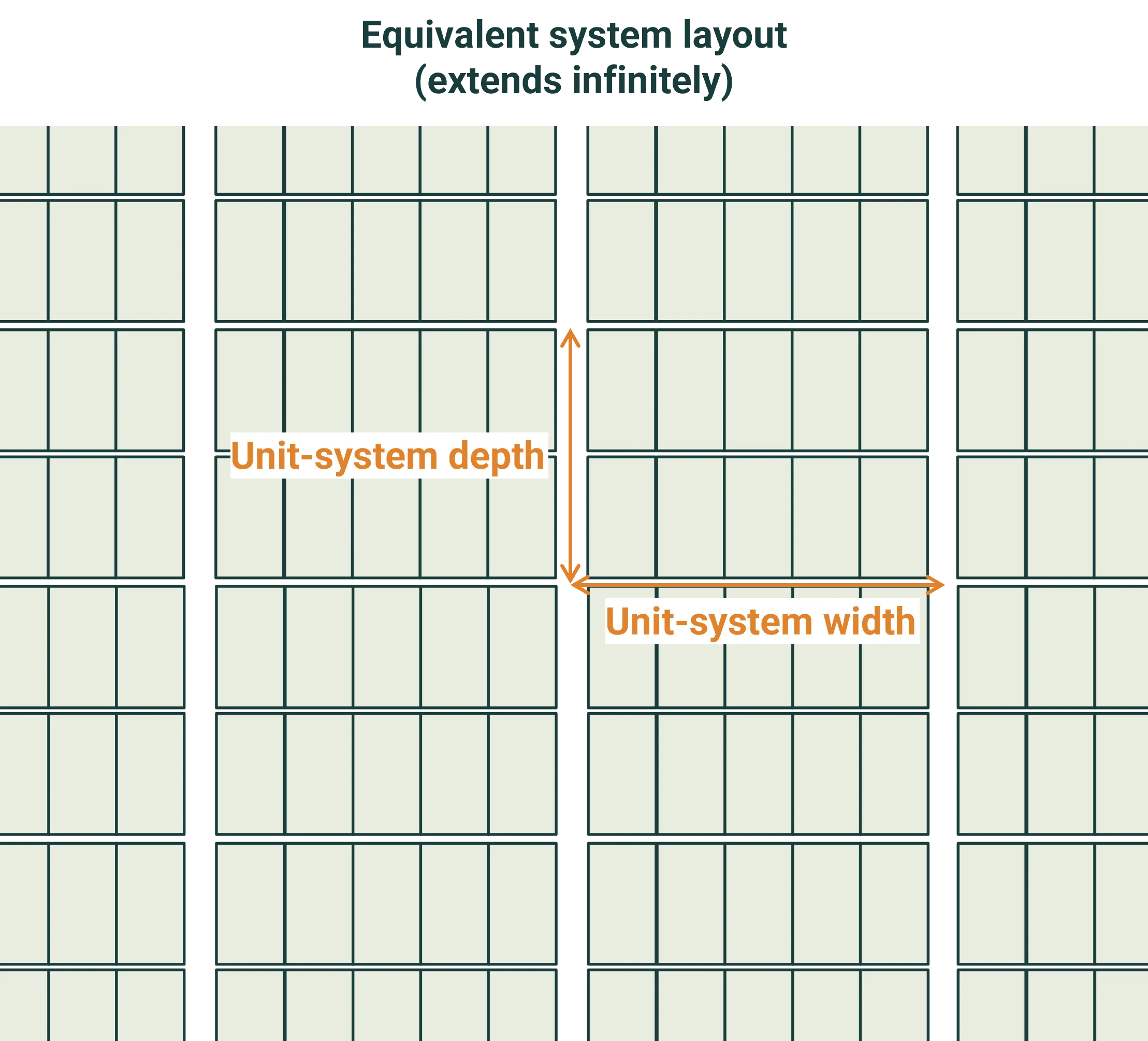
波浪单元系统在每个方向上无限重复。因此,模拟表示大型系统中的中心波浪,并忽略任何系统边缘效应。
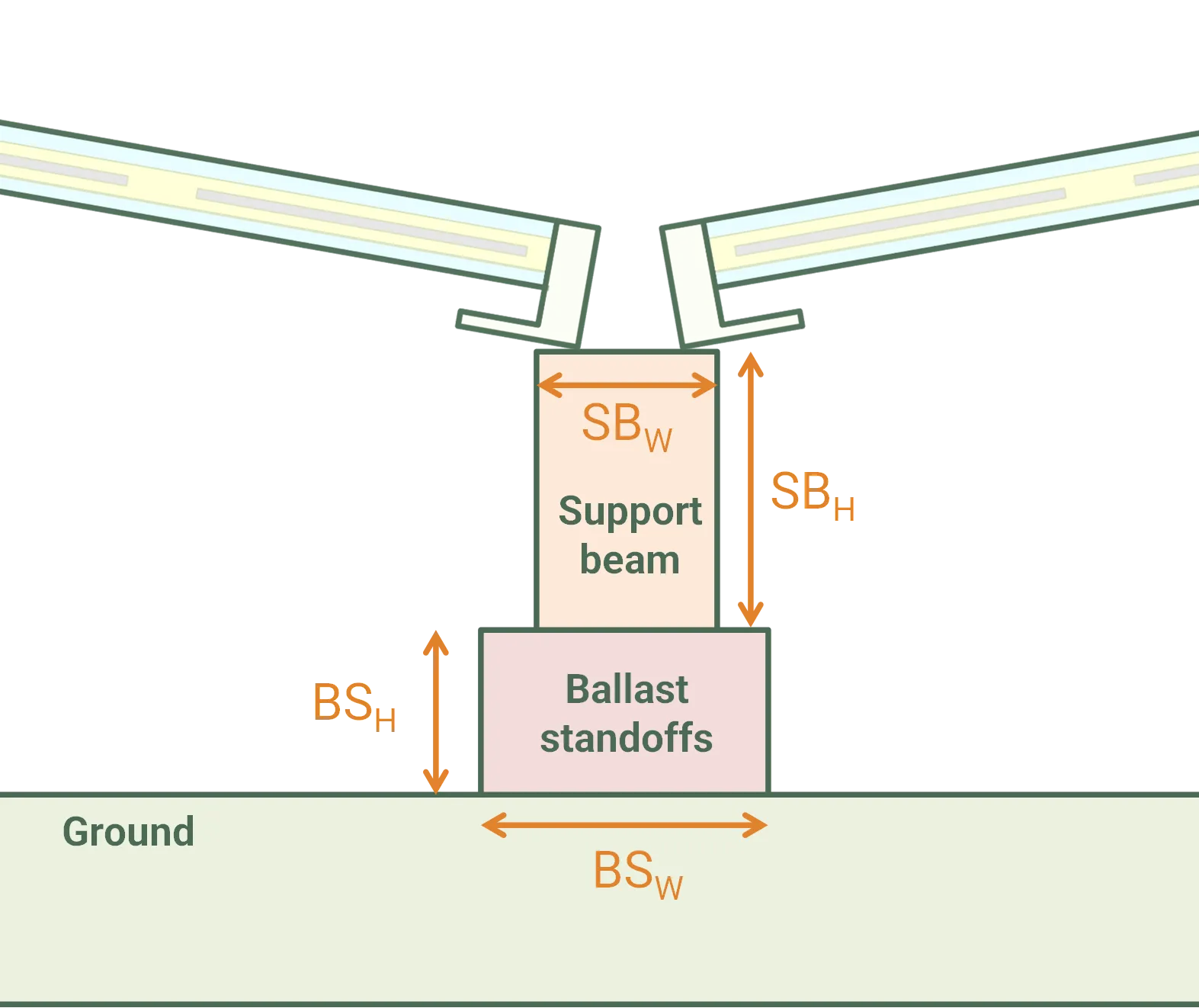
压载直接放置在地面上,用于增加组件的垂直位置。它们由支撑梁以及可选的支柱和稳定线定义。SunSolve 将支撑梁和支柱视为矩形棱柱。稳定线是圆柱。
支撑梁尺寸参数
Section titled “支撑梁尺寸参数”- 宽度 (SBW): 垂直于梁长度的水平尺寸(0-10,000 cm)
- 高度 (SBH): 支撑梁的垂直尺寸(0-10,000 cm)
- 长度 (SBL): 支撑梁沿波浪方向的长度(0-10,000 cm)
支柱尺寸参数
Section titled “支柱尺寸参数”- 宽度 (BSW): 垂直于支柱长度的水平尺寸(0-10,000 cm)
- 高度 (BSH): 支柱的垂直尺寸(0-10,000 cm)
- 长度 (BSL): 支柱的长度(0-10,000 cm)
- 支柱数量: 每个支撑梁的数量
- 间距 (BSP): 支柱之间的间距(对于固定间距模式,0-10,000 cm)
- 直径 (SWD): 圆柱形稳定线的直径(0-10,000 cm)
- 从边缘偏移 (SWO): 从支撑梁边缘的距离(0-10,000 cm)
下图定义了这些尺寸。
支柱间距选项
Section titled “支柱间距选项”有两个选项用于设置支柱的间距。在两种情况下,间距都以支撑梁的中间为中心。
-
均匀间隔: 间距设置为第一个和最后一个支柱的边缘与支撑梁的边缘对齐,剩余的支柱均匀间隔。
-
固定间距: 用户通过 BSp 输入输入间距。如果支柱从支撑梁边缘向后放置,应使用此设置。
导轨支撑组件并调整组件的垂直位置。导轨位于每个组件的角落(即在波浪谷和峰处)。下部导轨组的垂直位置相对于厊载支撑梁顶部定义,或者当没有支撑梁时相对于地面定义。旋转高度 RRH 是该参考点与旋转点之间的距离(有关更多详细信息,请参阅高度定义部分)。上部导轨与组件顶部对齐。
导轨排列选项
Section titled “导轨排列选项”导轨沿波浪横向的位置由排列设置控制:
对齐到组件边缘(标准)
- 导轨中心与组件之间横向间隙的中心对齐
- 组件底部与支架顶部对齐
- 每个间隙一个导轨,并且在波浪边缘有一个带有单个支架(面向内侧)的导轨

每个组件分组(需要高级波浪权限)
- 每个组件分布多个导轨,间距可配置
- 导轨数量: 每个组件组的导轨数量
- 导轨间距 (RP): 组内导轨之间的中心到中心间距(0-10,000 cm)
- 导轨以每个组件为中心,它们之间有间距间隔
- 导轨形状旋转 180 度(反转),与边缘对齐选项相比
- 组件的最低点直接位于支架上

导轨尺寸参数
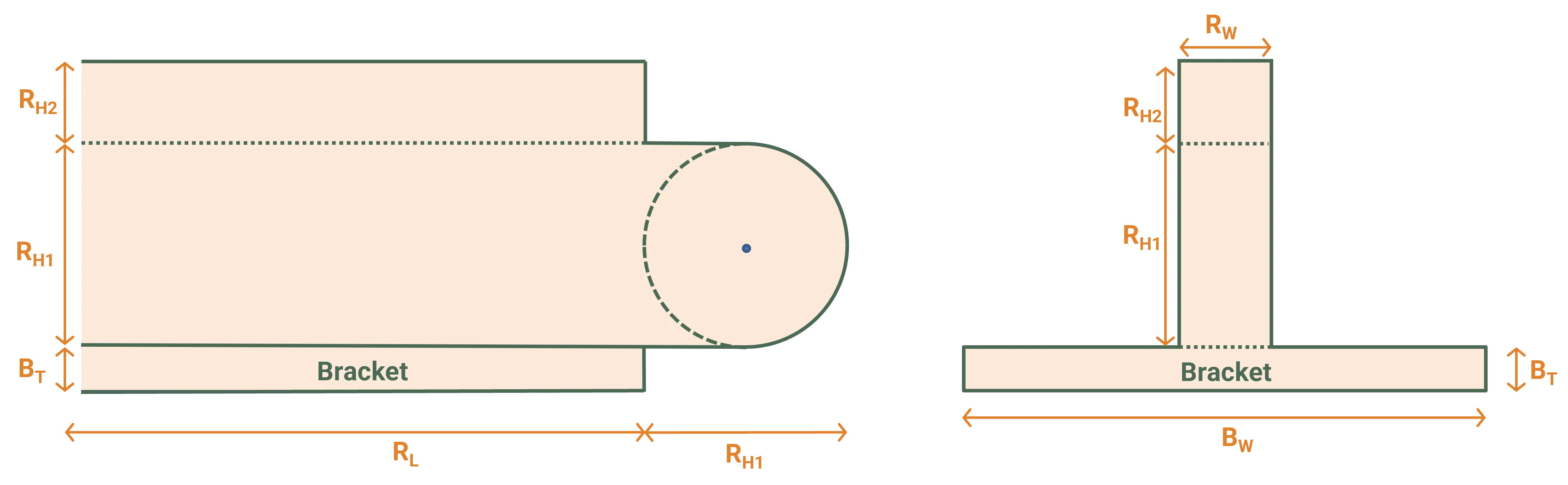
Section titled “导轨尺寸参数”导轨形状由支架(支撑组件)和两个导轨部分组成:
- 导轨长度 (RL): 导轨沿组件边缘的长度(0-10,000 cm)
- 导轨内宽 (RW): 导轨通道的宽度(0-10,000 cm)
- 导轨高度(主) (RH1): 第一个(主)导轨部分的高度,包括圆形连接件(0-10,000 cm)
- 导轨额外高度 (RH2): 主部分上方的额外导轨高度(0-10,000 cm)
- 支架宽度 (BW): 组件支撑支架的宽度(0-10,000 cm)
- 支架高度 (BH): 支架的垂直高度(0-10,000 cm)
- 旋转高度 (RRH): 从参考点(支撑梁顶部或地面)到旋转点的垂直距离(0-10,000 cm)
第一个导轨部分 RH1 包括一个圆形连接件,其中心定义了导轨和组件的高度(请参阅高度定义部分)。圆形部分的直径由 RH1 设置,并向导轨添加额外长度。
连接件提供了一个位于导轨旋转点上的矩形块。它们沿波浪横向应用,在组件的顶部和底部,在任何有导轨的位置。在组件顶部,连接件垂直对齐到单元系统盒的顶部。在组件底部,连接件直接位于支撑梁顶部,或者如果不使用支撑梁则直接位于地面。连接件不影响组件的高度或其旋转轴。
连接件尺寸参数
Section titled “连接件尺寸参数”连接件的尺寸分别为上部和下部位置定义:
下部连接件:
- 宽度 (JW,lower): 垂直于波浪方向的水平尺寸(0-200 cm)
- 高度 (JH,lower): 垂直尺寸(0-200 cm)
- 厚度 (JB,lower): 沿波浪方向的尺寸(0-200 cm)
上部连接件:
- 宽度 (JW,upper): 垂直于波浪方向的水平尺寸(0-200 cm)
- 高度 (JH,upper): 垂直尺寸(0-200 cm)
- 厚度 (JB,upper): 沿波浪方向的尺寸(0-200 cm)
系统高度、倾角和旋转轴
Section titled “系统高度、倾角和旋转轴”下图定义了对确定组件高度至关重要的系统组件的垂直距离。
组件高于地面的高度由厊载支撑梁 (SBH)、厊载支柱 (BSH) 和导轨旋转高度 (RRH) 增加。然后,由于导轨排列和尺寸,组件高度会增加或减少。
排列对齐到组件边缘: 组件高度包括导轨几何形状和组件倾角的调整。
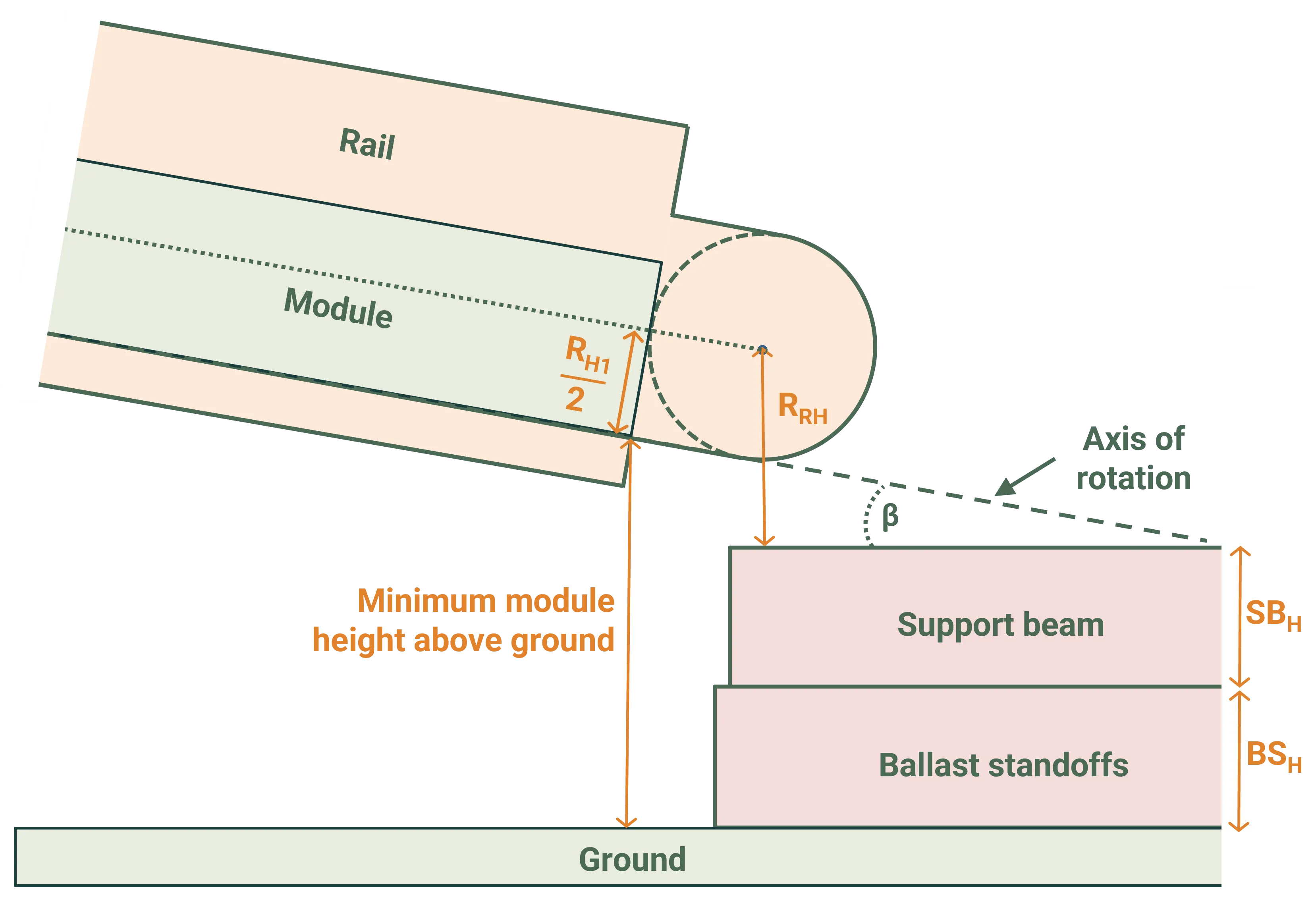
其中最后一项考虑了倾斜组件的垂直贡献。
排列每个组件分组: 组件高度包括额外的支架高度和完整导轨高度项。
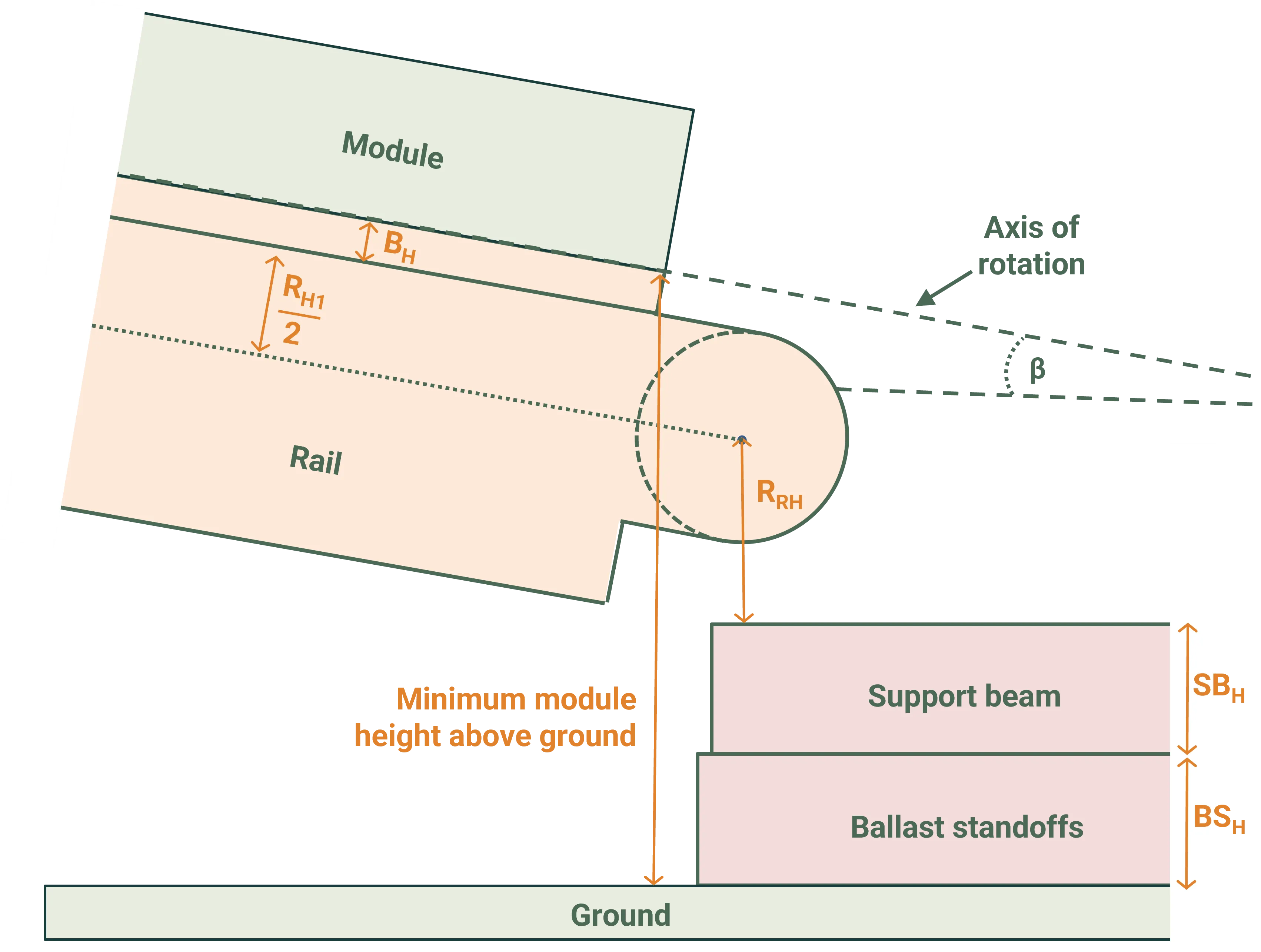
其中最后一项考虑了倾斜组件的垂直贡献。
倾斜方向和方位
Section titled “倾斜方向和方位”波浪由两个倾斜方向定义;主倾角和次倾角。主面板以相对于正北的方位角 (φ) 定义的方向倾斜角度 (β)。次面板倾斜 -β,这实际上给予它们与主面板相反 180 度的方向。在时间序列输出文件中,这将显示为负倾角。请注意,可以通过输入负倾角来反转波浪方向,但在这种情况下,系统组件可能无法正确对齐。
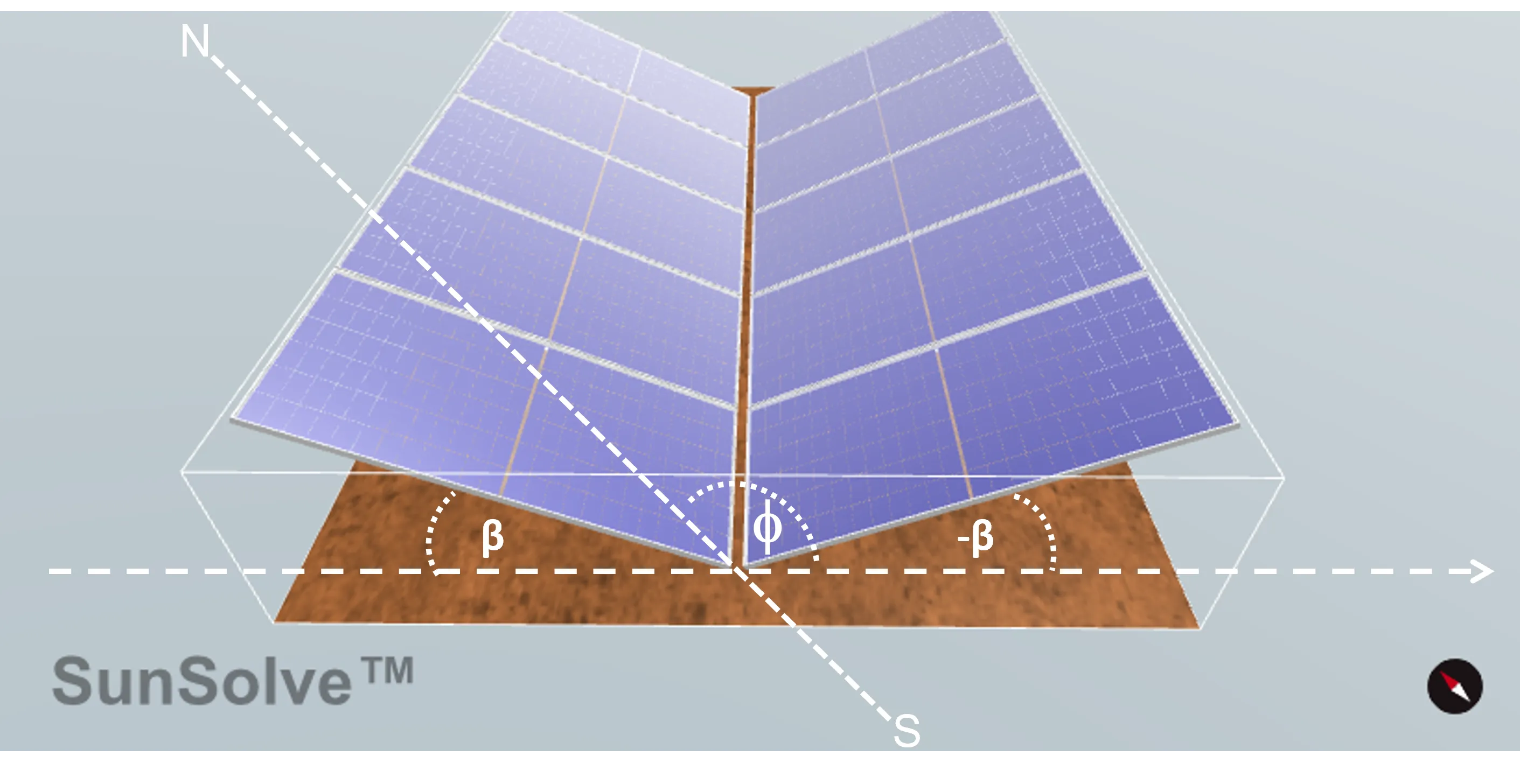
旋转轴始终与组件的底边对齐。