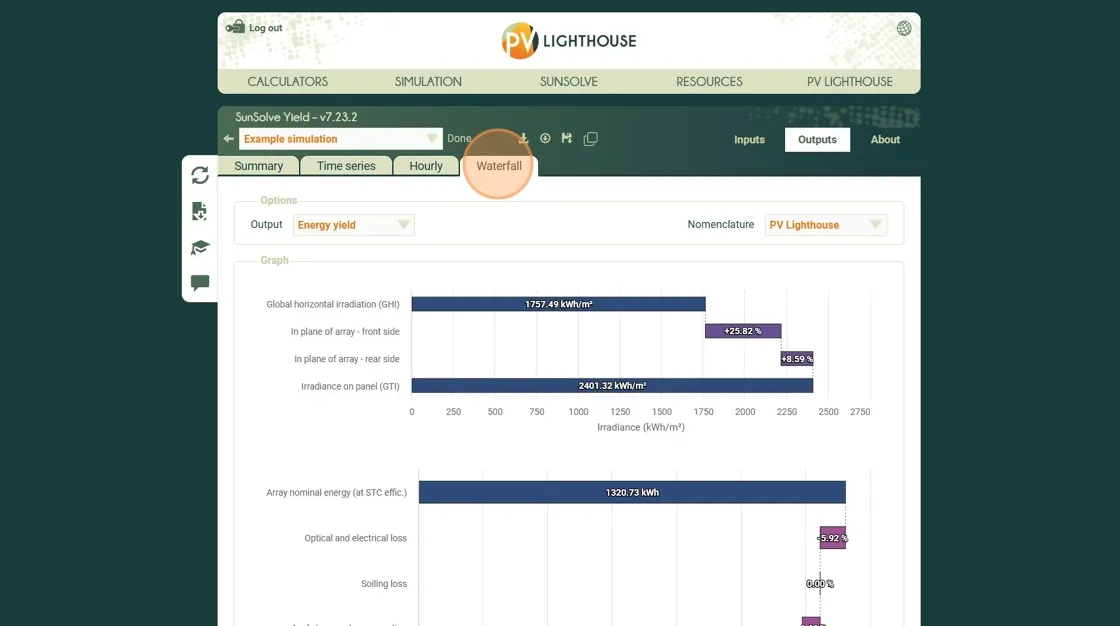
SunSolve 使用瀑布式图表提供系统内光学、热学和电学损失的渐进式分解。
图表中的每个柱形代表能量流动的一个阶段——从入射阳光,通过组件的直流输出,到逆变器的交流输出。
这有助于识别哪些过程对性能损失贡献最大,例如光学遮挡、温度效应或电气失配。
它还提供了一个有用的可视化工具,用于快速检查仿真结果的合理性。
图表的上半部分显示辐照度分量,展示前后表面的平面内辐照度与水平面上的全局辐照度的比较。
下半部分呈现能量产出链,从阵列的标称能量开始,应用连续的增益和损失,直到达到最终的交流能量输出。
虽然 SunSolve 可以在单次仿真中单独量化某些损失,但许多损失无法单独量化。
这是基于物理模型的求解器的本质特性,某些效应无法轻易分离出来。
这些组合损失中的许多都包含在光学和电学损失类别中。
请参阅下面的描述以获取更多详细信息。
关于时间步累积的说明:
此瀑布图中的所有值都在仿真期间累积。
值的计算方法是将各个时间步结果乘以时间步持续时间 τk(小时),然后对仿真中的所有时间步(由 k 索引)求和。
瀑布图的顶部显示太阳能阵列上的入射辐照度,考虑了阵列几何形状、方位和行间遮挡。此部分以 kWh/m² 为单位显示辐照度值。
单位: kWh/m²
描述: 水平表面接收到的总太阳辐照度,包括直射光束和漫射分量。这代表现场可用的基准太阳能资源。
计算: 从天气文件数据在分析期间求和。
HG=k∑GHI(k)τk
单位: kWh/m², %
描述: 组件阵列前表面的入射总辐照度,考虑了阵列倾角和方位,在仿真时间范围内求和。它与 HG 之间的差异代表由于阵列安装角度导致的增益或损失。
计算: 使用视角因子模型计算,该模型将辐照度转换到倾斜平面,包括直射光束、漫射天空和地面反射分量。
视角因子模型固有地考虑了行间遮挡,与热模型中描述的模型相同。
请注意,此阶段不包括光学损失,如 IAM、结构遮挡(扭矩管、安装导轨)和光谱效应——它们稍后会在瀑布图的光学和电学损失中出现。
HPOA,f=k∑GPOA,f(k)τk
损失/增益分数: 相对于水平面全局辐照度的变化,以百分比表示。
δHPOA,f=HGHPOA,f−HG
单位: kWh/m², %
描述: 组件后表面的入射辐照度,在仿真时间范围内求和。此条目仅针对双面系统显示(即使用的组件被指定为双面的仿真)。
计算: 使用与热模型相同的视角因子模型计算,包括到达后表面的地面反射、天空直射和天空漫射分量。
该模型固有地考虑了后表面的行间遮挡效应。
不包括光学损失,如 IAM、结构遮挡和光谱效应——它们稍后会在瀑布图的光学和电学损失中出现。
HPOA,r=k∑GPOA,r(k)τk
增益分数: 相对于前侧平面内辐照度的额外辐照度。
δHPOA,r=HPOA,fHPOA,r
单位: kWh/m²
描述: 倾斜组件表面上的总全局辐照度。对于单面组件,这等于前侧辐照度。对于双面组件,这是前后辐照度的总和。
计算: 上述前后辐照度的简单求和。只有双面组件才包括后侧。
对于单面组件:
HT=HPOA,f
对于双面组件:
HT=HPOA,f+HPOA,r
注意: 组件的双面率因子 (fb) 不影响此辐照度计算。
双面率因子描述的是后侧吸收的光如何转换为太阳能电池中的电力。
HT 值是电转换之前的原始光学值。
瀑布图的下半部分显示入射辐照度转换为电能的过程,通过能量转换链应用连续的损失。
单位: kWh、kWh/kWp 或 kWh/m²
描述: 如果组件在所有入射辐照度下以其额定效率运行,将产生的理论直流能量。这代表电能瀑布图的起点。
计算: 此标称能量通过将全局倾斜辐照度乘以组件效率和总组件面积来计算:
Enominal=HT⋅ηSTC⋅Amod,total
其中:
- Enominal 是 STC 效率下的理论能量 (kWh)
- HT 是全局倾斜辐照度 (kWh/m²)
- ηSTC 是标准测试条件下的组件效率
- Amod,total 是总组件面积 (m²)
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于光学效应和电气性能变化导致的组合损失。此类别包括多种在基于物理的求解器中难以分离的效应,包括:
- 组件结构内的光学损失(玻璃和封装材料中的反射和吸收)
- 组件表面的入射角修正因子 (IAM)
- 入射光和场景材料的波长依赖行为产生的光谱效应
- 波长依赖的地面反射率及其对辐照度的影响
- 太阳能电池和组件的外部量子效率
- 系统结构的遮挡(例如,跟踪器扭矩管、安装导轨)
- 场景中表面之间的多次反射(组件玻璃、地面、相邻行)
- 低辐照度电气性能效应
- 组件内电池吸收变化
此类别的两个主要贡献者是:
- 辐照度瀑布图中显示的理论辐照度值(使用视角因子模型计算)与太阳能电池实际吸收的光(通过波长依赖的光线追踪确定)之间的差异
- 使用等效电路求解来计算每个电池的功率输出,这捕获了标称 STC 效率未考虑的非理想电气行为。
计算:
- 使用光线追踪来确定每个电池内的光学吸收(通常是硅片体和一组收集层)。
这种吸收是波长依赖的,对直射和漫射光分别记录,并在主吸收器中分别记录前后入射的光。
- 将吸收与收集效率和入射光谱相结合,以确定每个电池内每个子电路的光电流密度。
- 在 25 °C 下求解每个子电路的 IV 曲线。请注意,标准电池架构具有单个子电路。串联器件有两个或更多。这些是每个单个太阳能电池内的子电路。
- 从这些曲线中提取每个子电路在最大功率点的功率 (Psub−circuit,j,25°C)。
- 然后通过对单元系统中每个太阳能电池的输出功率求和来计算能量。
对于包含多个电路的太阳能电池(即串联电池),能量是每个子电路最大功率输出的总和(即在此阶段子电路之间没有失配损失)
每个电池的功率确定为:
Pcell,i,25°C(k)=j=1∑NsubPsub−circuit,i,j,25°C(k)
其中:
- Pcell,i,25°C(k) 是电池 i 在时间步 k 的最大功率,在标称温度 25 °C 下计算 (W)
- Psub−circuit,i,j,25°C(k) 是电池 i 内第 j 个子电路在时间步 k 的最大功率,在 25 °C 下计算 (W)
- Nsub 是每个电池的子电路数量(例如,单结电池为 1,串联电池为 2 或更多)
- i 是电池索引
- j 是电池内的子电路索引
- k 是时间步索引
对于组件直流仿真,能量通过对光线追踪单元系统中的所有电池求和来计算:
Eopt+elec=k∑(i=1∑NcPcell,i,25°C(k))⋅τk
其中:
- Eopt+elec 是光学和电学损失后的直流能量 (kWh)
- Nc 是光线追踪单元系统中的总电池数
- i 是电池索引
- Pcell,i,25°C(k) 是电池 i 在时间步 k 的最大功率点输出,在 25 °C 下计算 (W)
对于串直流和阵列交流仿真,单元系统结果被缩放到完整的电气系统:
Eopt+elec=k∑[(i=1∑NcPcell,i,25°C(k))⋅Nunit−system_modulesNtotal_modules]⋅τk
其中:
- Eopt+elec 是集总光学和电学损失后的实际直流能量 (kWh)
- Pcell,i,25°C(k) 是电池 i 在时间步 k 的最大功率点输出,在标称温度 25 °C 下计算 (W)
- Ntotal_modules 是电气系统中的总组件数
- Nunit−system_modules 是光线追踪单元系统中的组件数
然后光学和电学损失为:
Lopt+elec=Enominal−Eopt+elec
损失分数: 相对于 STC 效率下的标称能量 Lopt+elec/Enominal
计算说明:
- 此阶段不应用组件双面率因子 (fb)。后侧的电转换直接由电池等效电路模型确定,而不是通过外部双面率参数缩放。
- 虽然在公式中没有明确说明,但 SunSolve 中的实现考虑了一个事实,即串或阵列定义可能导致某些电池出现的频率高于其他电池。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于组件表面的污垢、灰尘或其他污染物减少光线透射到太阳能电池中而导致的能量损失。
计算: 积尘损失减少了每个电池的光电流密度:
JL,soiled=JL,RT⋅(1−fsoiling)
其中 JL,RT 是从光线追踪确定的光电流密度(积尘之前),fsoiling 是用户定义的积尘分数(0 到 1)。如果提供了时间变化的积尘数据,则这可以按时间步变化。
然后通过在 25 °C 下独立求解每个电池来重新计算带有积尘的能量:
对于组件直流仿真:
Esoiled=k∑(cells∑Pcell,i,soiled,25°C(k))⋅τk
对于串直流和阵列交流仿真:
Esoiled=k∑[(cells∑Pcell,i,soiled,25°C(k))⋅Nunit−system_modulesNtotal_modules]⋅τk
积尘损失为:
Lsoiling=Eopt+elec−Esoiled
其中:
- JL,RT 是积尘前光线追踪的光电流密度 (mA/cm²)
- JL,soiled 是积尘后减少的光电流密度 (mA/cm²)
- fsoiling 是积尘损失分数(无量纲)
- Pcell,i,soiled 是带有积尘减少光电流的电池 i 的功率输出
- Esoiled 是积尘损失后的直流能量 (kWh)
- Eopt+elec 是积尘损失前的直流能量 (kWh)
损失分数: Lsoiling/Eopt+elec
注意: 如果太阳能电池有多个子电路(即它是串联电池),则两个子电路的 JL 都会减少。电池功率确定为子电路的总和(即无互连),如前所述。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于实际电池工作温度 (Top) 与 STC 参考温度(25 °C)之间的差异导致的能量变化。在大多数情况下这通常是损失,但在寒冷气候中可能是小增益。
计算: 每个电池的等效电路参数,包括光电流,都根据计算的组件工作温度进行调整:
JL,Top=JL,soiled⋅[温度校正因子]
然后使用温度校正参数重新计算能量:
对于组件直流仿真:
Etemp=k∑(cells∑Pcell,i,Top(k))⋅τk
对于串直流和阵列交流仿真:
Etemp=k∑[(cells∑Pcell,i,Top(k))⋅Nunit−system_modulesNtotal_modules]⋅τk
温度校正(损失或增益)为:
Ltemp=Esoiled−Etemp
其中:
- JL,Top 是温度校正后的光电流 (mA/cm²)
- Top 是计算的电池工作温度 (°C)
- Pcell,i,Top 是带有温度调整等效电路参数的电池 i 的功率输出
- Etemp 是温度校正后的直流能量 (kWh)
- Esoiled 是 25 °C 下带有积尘的直流能量 (kWh)
损失分数: Ltemp/Esoiled
注意: 如果太阳能电池有多个子电路(即它是串联电池),则两个子电路的 JL 都会针对 Top 进行调整。电池功率确定为子电路的总和(即无互连),如前所述。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于组件内电池之间的电气失配导致的能量损失。
电池由于非均匀照明(例如,部分遮挡、边缘效应)而经历不同的辐照度,导致它们在不同的电流水平下工作。
串联电池必须携带相同的电流,迫使一些电池偏离其最大功率点,从而导致功率损失。
对于具有多个子电路的电池(即串联电池),此步骤还考虑了这些子电路之间的失配。
计算: 每个组件内的电池现在以其串/并联配置进行电气连接。单个电池最大功率总和与实际组件最大功率之间的差异代表失配损失。包括旁路二极管的影响。
对于组件直流仿真:
Emodule=k∑(modules∑Pmodule(k))⋅τk
对于串直流和阵列交流仿真:
Emodule=k∑[(modules∑Pmodule(k))⋅Nunit−system_modulesNtotal_modules]⋅τk
电池间失配损失为:
LC2C=Etemp−Emodule
其中:
- Pmodule 是电池电气连接后的最大组件功率 (W)
- Emodule 是带有电池间失配的直流能量 (kWh)
- Etemp 是在工作温度下独立电池功率的总和 (kWh)
损失分数: LC2C/Etemp
单位: kWh、kWh/kWp 或 kWh/m²
描述: 所有组件的总直流电能输出,包括截至此点的所有损失(光学、电气、积尘、温度和电池间失配)。对于仅组件仿真,这是最终输出。
计算: 这等于电池间失配步骤中计算的 Emodule:
Eout,DC=Emodule
其中:
- Eout,DC 是所有组件的输出直流能量 (kWh)
- Emodule 是电池间失配损失后的直流能量 (kWh)
注意: 这是瀑布图中的中间总计,代表串/阵列级别效应之前的能量。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于串内串联的组件之间的电气失配导致的能量损失。不同的组件经历不同的工作条件(辐照度、温度、积尘),但在串联连接时必须携带相同的电流。
对于阵列交流仿真: 此损失类别还包括串与串之间的失配。当多个串并联组合时,它们必须在相同的电压下工作,防止每个串在其单独的最大功率点工作。报告的总损失考虑了串联组合(组件 → 串)和并联组合(串 → 阵列)。
计算: 组件间失配通过将组件 IV 曲线串联组合(对于串)或串并联组合(对于阵列)来计算。有关算法详细信息,请参阅系统电子设备中的串 IV 曲线和阵列 IV 曲线部分。
对于串直流:
EDC,pre−wiring=k∑string_defs∑Pstring(k)⋅τk
对于阵列交流:
EDC,pre−wiring=k∑Parray(k)⋅τk
相应的损失为:
LM2M=Emodule−EDC,pre−wiring
其中:
- Emodule 是来自组件的直流能量,即独立组件功率的总和 (kWh)
- EDC,pre−wiring 是在应用直流布线损失之前,串 MPP 时的直流能量(对于串直流仿真)或阵列 MPP 时的直流能量(对于阵列交流仿真) (kWh)
- string_defs 代表系统中所有定义的串配置
- Pstring(k) 是时间步 k 的串最大功率点 (W)
- Parray(k) 是时间步 k 的阵列最大功率点 (W)
损失分数: LM2M/Emodule
注意: 此条目仅针对串和阵列仿真显示(不针对仅组件仿真)。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于组件、串和逆变器之间的布线中的电阻 (I²R) 损失导致的直流能量损失,在阵列的最大功率点计算。
计算: 在每个时间步,在阵列的最大功率点计算瞬时布线功率损失,然后通过乘以时间步持续时间转换为能量。有关详细计算,请参阅直流工作点和布线损失。
Lwiring,MPP=k∑Pwiring,MPP(k)⋅τk
其中:
- Lwiring,MPP 是仿真期间 MPP 时的总布线能量损失 (kWh)
- Pwiring,MPP(k)=IMPP2(k)⋅RDC,wiring 是时间步 k 的瞬时布线功率损失 (W)
- IMPP(k) 是时间步 k 的阵列最大功率点电流 (A)
- RDC,wiring 是阵列和逆变器之间的直流布线电阻 (Ω)
损失分数: Lwiring,MPP/EDC,pre−wiring
注意: 这是阵列最大功率点的布线损失。稍后将应用额外的“校正”以考虑实际逆变器工作点。
单位: kWh、kWh/kWp 或 kWh/m²
描述: 在考虑组件间失配和布线损失后,但在应用逆变器约束之前,阵列最大功率点可用的直流能量。
计算: 这是从组件输出中减去失配和布线损失后剩余的能量:
Earray,MPP=Emodule−LM2M−Lwiring,MPP
其中:
- Earray,MPP 是阵列 MPP 的虚拟直流能量 (kWh)
- Emodule 是来自组件的直流能量 (kWh)
- LM2M 是组件间失配损失 (kWh)
- Lwiring,MPP 是MPP 时的欧姆布线损失 (kWh)
注意: 这是一个“虚拟”能量,因为由于电压、电流或功率约束,逆变器可能不会在其真正的 MPP 下操作阵列。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 对布线损失的调整,以考虑阵列在 MPP 下工作与逆变器强加的工作点之间的差异。当逆变器迫使阵列偏离 MPP(由于 Vmin、Vmax 或 Imax 约束)时,电流会发生变化,影响 I²R 损失。
计算: 实际工作点布线损失与 MPP 时布线损失之间的差异。有关算法详细信息,请参阅交流输出和功率限制第 4 步。
Lwiring,correction=k∑(Pwiring,actual(k)−Pwiring,MPP(k))⋅τk
其中:
- Lwiring,correction 是仿真期间的总布线损失校正 (kWh)
- Pwiring,actual(k)=Iactual2(k)⋅RDC,wiring 是时间步 k 实际工作点的瞬时布线功率损失 (W)
- Pwiring,MPP(k)=IMPP2(k)⋅RDC,wiring 是时间步 k MPP 时的瞬时布线功率损失 (W)
- Iactual(k) 是时间步 k 逆变器强加工作点的阵列电流 (A)
- IMPP(k) 是时间步 k 最大功率点的阵列电流 (A)
- RDC,wiring 是直流布线电阻 (Ω)
损失分数: Lwiring,correction/EDC,pre−wiring
注意: 这可以是正值(表明当工作点电流超过 MPP 电流时额外损失)或负值(表明当工作点电流低于 MPP 电流时损失减少)。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 当逆变器输入端的直流功率(当阵列在其最大功率点工作时)产生的交流输出超过逆变器额定交流功率限制时发生的能量损失。为了防止这种情况,逆变器通过增加电压来调整阵列的工作点,这使阵列沿着其 IV 曲线移动到较低的功率点。这减少了逆变器的直流输入功率和电流。限制损失是 MPP 时可用的直流功率与调整后减少的直流功率之间的差异。它以逆变器输入端的直流功率损失来衡量(在考虑直流布线损失后)。
计算: 在每个时间步:
- 计算阵列在 MPP 工作时逆变器输入端的直流功率: PDC,in,MPP(k)
- 如果产生的交流功率超过逆变器的交流限制,通过增加电压调整阵列工作点
- 计算调整后减少的直流输入功率: PDC,in,clip(k)
- 限制损失为:
Lclipping=k∑max(0,PDC,in,MPP(k)−PDC,in,clip(k))⋅τk
其中:
- Lclipping 是总限制损失 (kWh)
- PDC,in,MPP(k) 是时间步 k 阵列 MPP 时逆变器输入端的直流功率 (W)
- PDC,in,clip(k) 是时间步 k 为交流功率限制调整后逆变器输入端的直流功率 (W)
PDC,in,MPP 和 PDC,in,clip 都在逆变器直流输入端子测量,并在其各自的工作点考虑直流布线损失。有关详细算法,请参阅交流输出和功率限制。
损失分数: Lclipping/Earray,MPP
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 当阵列直流功率低于逆变器的最小工作阈值 (Pmin 或 Pdc,thr) 时的能量损失。
低于此功率水平时,逆变器无法工作,不会转换能量。
计算: 在阵列功率低于阈值的时间步,所有可用的直流能量都会损失:
LPmin=k∑{Pavailable(k)⋅τk0if Pavailable(k)<Pminotherwise
其中:
- LPmin 是总功率阈值损失 (kWh)
- Pavailable(k) 是时间步 k 限制后可用的直流功率 (W)
- Pmin 是逆变器的最小工作功率阈值 (W)
有关此约束如何在算法中应用,请参阅逆变器输入约束。
损失分数: LPmin/(Earray,MPP−Lwiring,correction−Lclipping)
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 当阵列最大功率点电压超出逆变器的工作电压窗口(低于 Vmin 或高于 Vmax)时的组合损失。
逆变器迫使阵列在电压限制下工作而不是在 MPP 下工作。
计算: 当阵列 MPP 电压超出逆变器的工作窗口时,损失为:
LV,threshold=k∑[PMPP(k)−Pactual,V(k)]⋅τk
其中:
- LV,threshold 是总电压阈值损失 (kWh)
- PMPP(k) 是在其最大功率点的阵列功率 (W)
- Pactual,V(k) 是受电压限制时的功率:
- 如果 VMPP(k)<Vmin: Pactual,V(k)=Parray(Vmin)
- 如果 VMPP(k)>Vmax: Pactual,V(k)=Parray(Vmax)
- 否则: Pactual,V(k)=PMPP(k)
- Vmin 和 Vmax 是逆变器的最小和最大输入电压 (V)
细分:
- Vmin 损失: 当 MPP 电压 < Vmin 时,阵列在 Vmin 下工作
- Vmax 损失: 当 MPP 电压 > Vmax 时,阵列在 Vmax 下工作
有关详细算法,请参阅逆变器输入约束。
损失分数: LV,threshold/(Earray,MPP−Lwiring,correction−Lclipping−LPmin)
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 当 MPP 时的阵列电流超过逆变器的最大输入电流额定值 (Imax) 时的能量损失。逆变器限制阵列电流,迫使工作偏离真正的 MPP。
计算: 当 MPP 时的阵列电流超过逆变器的最大输入电流时:
LImax=k∑max(0,PMPP(k)−P(Imax))⋅τk
其中:
- LImax 是总电流限制损失 (kWh)
- PMPP(k) 是最大功率点的阵列功率 (W)
- P(Imax) 是电流限制为 Imax 时的阵列功率 (W)
- Imax 是逆变器的最大输入电流额定值 (A)
有关详细算法,请参阅逆变器输入约束。
损失分数: LImax/(Earray,MPP−Lwiring,correction−Lclipping−LPmin−LV,threshold)
单位: kWh、kWh/kWp 或 kWh/m²
描述: 应用所有直流损失和逆变器工作点约束后,逆变器输入端子可用的总直流能量。这是将转换为交流的能量。
计算: 逆变器约束(限制、Pmin、Vmin、Vmax、Imax)迫使阵列偏离其最大功率点工作。当发生这种情况时,阵列功率和直流布线损失都会发生变化。逆变器输入端的能量为:
EDC,inv=Earray,MPP−Lclipping−LPmin−LV,threshold−LImax−Lwiring,correction
其中:
- EDC,inv 是逆变器输入端的直流能量 (kWh)
- Earray,MPP 是 MPP 时布线损失后的阵列 MPP 虚拟直流能量 (kWh)
- Lclipping、LPmin、LV,threshold、LImax 是逆变器约束损失 (kWh)
- Lwiring,correction 是布线损失校正 (kWh,可以是负数)
注意: 这代表逆变器将处理的实际直流能量。约束损失是基于从 MPP 工作点移动到受约束工作点时逆变器输入端直流功率的减少来计算的。
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 由于逆变器转换效率导致的能量损失。由于开关损失、变压器损失和其他工作期间的内部功耗,逆变器无法以 100% 的效率将直流转换为交流。
计算: 由于逆变器转换效率导致的能量损失:
Lconv=k∑PDC,in(k)⋅[1−ηinv(PDC,in(k),VDC(k))]⋅τk
等价于:
EAC,gross=EDC,inv−Lconv
其中:
- Lconv 是总转换损失 (kWh)
- PDC,in(k) 是时间步 k 的直流输入功率 (W)
- ηinv(P,V) 是逆变器效率作为功率和电压的函数(无量纲)
- VDC(k) 是时间步 k 的直流输入电压 (V)
- EAC,gross 是夜间消耗之前的总交流能量 (kWh)
有关效率模型的详细信息,请参阅逆变器转换效率。
损失分数: 相对于逆变器输入端的直流能量。Lconv/EDC,inv
单位: kWh、kWh/kWp 或 kWh/m², %
描述: 逆变器在夜间或非发电期间为内部操作(如冷却风扇、显示器、通信系统和待机功率)消耗的交流能量。
计算: 在非发电期间消耗的交流能量:
Lnight=k∈Knight∑Pnight⋅τk
其中:
- Lnight 是总夜间消耗 (kWh)
- Knight 是逆变器不发电时的时间步集合
- Pnight 是逆变器的夜间消耗功率 (W)
损失分数: 相对于转换后的交流能量。Lnight/EAC,gross
单位: kWh、kWh/kWp 或 kWh/m²
描述: 系统的最终净交流电能输出,代表交付给电网或负载的能量。这是瀑布图的底线,包括所有光学、热学、电气和逆变器损失。
计算: 所有损失后的最终交流能量:
EAC,out=EAC,gross−Lnight
等价地,从标称能量求和:
EAC,out=Enominal−Lopt+elec−Lsoiling−Ltemp−LC2C−LM2M−Lwiring,MPP−Lwiring,correction−Lclipping−LPmin−LV,threshold−LImax−Lconv−Lnight
其中:
- EAC,out 是净交流能量输出 (kWh)
- EAC,gross 是逆变器转换后的总交流能量 (kWh)
- 所有 L 项是损失,其中正值代表能量损失
- Ltemp 通常是正值(损失),但在寒冷气候中可以是负值(增益)
- Lwiring,correction 可以是正值(布线损失在受约束工作点增加)或负值(布线损失减少)相对于 MPP
注意: 这是用于能量产出计算和性能指标的最终输出值。
瀑布图计算中使用的组件效率来自组件的额定规格(即标称组件功率)。
计算:
ηSTC=Amodule⋅1000Pnom
其中:
- ηSTC 是标准测试条件下的组件效率(无量纲分数)
- Amodule 是单个组件的面积 (m²)
总组件面积的计算根据仿真类型而异,考虑了光线追踪光学单元系统和电气阵列定义之间的差异。
对于组件直流仿真:
总组件面积等于光线追踪单元系统中所有组件面积的总和。
对于串直流和阵列交流仿真:
总组件面积根据电气阵列定义进行缩放:
Amod,total=Amodule⋅Ntotal_modules
其中:
- Amodule 是单个组件的面积 (m²)
- Ntotal_modules 是电气阵列中的总组件数(考虑串长度和并联串)
示例场景:
- 光线追踪单元系统: 7 个组件
- 每个组件: 2.0 m²
- 串配置: 每串 28 个组件
- 对于串直流求解: Amod,total=2.0⋅28=56.0 m²
对于阵列交流仿真:
计算进一步扩展以包括多个并联串:
Ntotal_modules=string_defs∑(Nmodules_per_string⋅Nstrings_parallel)
这种方法允许 SunSolve 对代表性单元系统进行光线追踪,同时通过将每个组件的结果缩放到完整的电气阵列定义,准确计算更大场地布局的能量产出。
注意: 光线追踪的单元系统面积代表光学仿真域,而总组件面积代表能量计算中使用的实际安装组件面积。
某些损失组件无法在单次仿真中单独量化,因为它们在基于物理的求解过程中固有地耦合在一起。然而,这些可以通过运行多次启用或禁用特定功能的仿真来估计:
- 光谱损失/增益: 比较启用与禁用光谱求解的仿真
- 遮挡损失: 将基准仿真与所有结构设置为透明的仿真进行比较。
- 双面增益: 将基准仿真与组件后表面被黑色吸收器覆盖的仿真进行比较。
- 反射率效应: 比较不同地面反射率值的仿真
其他损失可能通过创建替代组件来计算。例如,对于 IAM 损失,创建一个在所有角度 IAM 都设置为 100% 的组件。