主求解算法
当用户运行SunSolve时,他们在五个选项卡上设置输入:
-
“天气”,定义场地位置、天气和大气条件;
-
“组件”,定义组件的物理尺寸和光学特性以及它包含的所有电池;
-
“系统”,定义组件的布局、任何结构组件(如立柱和椽子)的物理尺寸以及系统的热模型;
-
“场”,定义组件串联和逆变器;以及
-
“选项”,定义各种算法的选项,例如太阳位置。
按下”播放”后,这些输入被发送到基于云的服务器,该服务器求解产量并将输出返回到用户的计算机。
下图描述了SunSolve用于确定能量产量的高级算法。该图显示了黄色的输入,以及它们如何输入到三个主要计算阶段:
阶段1求解单元系统内每个电池在大范围太阳位置下的阳光吸收。1
阶段2求解日期范围内每个时间步长的DC组件输出。它将阶段1的光学结果与热和电模型相结合,为单元系统中的每个组件生成IV曲线。
阶段3将阶段3中单个组件的结果组合起来,以确定组件串的DC输出和逆变器的AC输出。
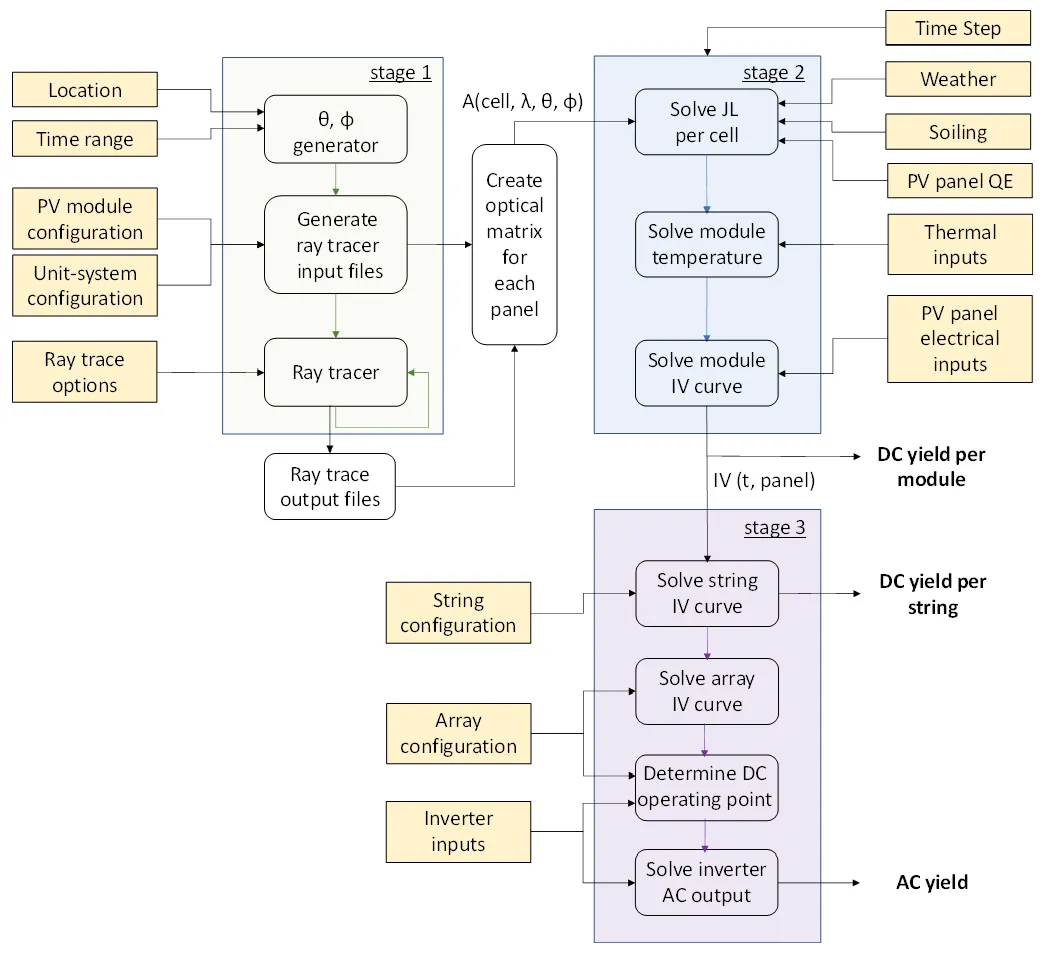 SunSolve Yield中求解阶段的高级图表
SunSolve Yield中求解阶段的高级图表我们现在参考本手册的相关部分概述每个阶段的详细信息。
SunSolve计算能量产量如下:它首先从天气文件(如TMY)加载天气。然后计算直射和漫射光的太阳光谱,以及入射到系统的角度。接下来,它使用光线追踪和薄膜光学来确定系统每个太阳能电池内的电流生成。它将该光生成电流馈入系统的等效电路模型,并确定每个组件的电流-电压输出。它还通过应用模型来考虑组件的热行为,以从环境条件确定组件温度并相应地调整电气输出。
阶段1求解包含一组组件(第6节)的单元系统(第7节)的光学。位置和时间范围用于沿太阳弧确定一组离散的太阳位置(第4.1节)。这与单元系统的定义相结合,创建一组静态光线追踪模型。2 为太阳弧上的每个点创建一个这样的模型,以确定对直射辐照度的响应。为漫射条件创建另一个模型,在此阶段始终使用各向同性辐照度求解3。这些单元系统中的每一个的光学都使用光线追踪算法(第4.1节)求解。这生成一组光线追踪结果,这些结果组合成光学矩阵,该矩阵将单元系统内任何电池的吸收存储为以下函数:(1)波长,(2)太阳位置,(3)漫射与直射光。
阶段2求解日期范围内每个时间步长系统中每个光伏面板的热和电结果。第一步是确定每个电池内的光生成分量(第9.1节)。这涉及应用漫射转置模型(第4.3节)、确定太阳位置(第4.1节)、插值最接近的三个太阳弧结果以及将入射光谱(第4.2节)与面板量子效率和任何所需的波长相关缩放(第6.1节)相结合。如果使用污染模型(第7.3节)来降低电流,则在此阶段应用它们以减少电池的光生成电流。然后根据加热和冷却机制的平衡(第8节)确定每个面板的工作温度。然后通过求解SPICE电路来确定每个面板在工作温度下的完整电流-电压曲线,该电路包含组件定义定义的布局内每个电池的等效电路4(第9节)。请注意,在此阶段,还在25°C下确定每个组件的DC最大功率输出,而不考虑组件布局内电池的互连。这两个解的结果用于计算由于温度和由于电池间失配导致的DC损失。在阶段2结束时,程序已确定单元系统中每个组件在单个工作温度下的IV曲线。DC组件产量通过假设完美的最大功率点跟踪并在指定时间范围内积分从这些曲线确定。
阶段3求解完整场布局内定义的一组逆变器的DC输入和AC电输出(第10节)。每个逆变器输入连接到任意数量的串联连接组件的并联串。在第一步中,通过组合单个组件的IV曲线来求解每个串5的IV曲线。在第二步中,通过并联组合串结果并应用DC布线损失来求解每个逆变器的DC输入。每个逆变器的AC输出根据DC输入和所选逆变器模型确定。